









Services on Demand
Journal

Article
 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mailIndicators
-
 Cited by SciELO
Cited by SciELO
Related links
-
 Similars in
SciELO
Similars in
SciELO  uBio
uBio
Share

 Permalink
PermalinkRevista Peruana de Biología
On-line version ISSN 1727-9933
Rev. peru biol. vol.20 no.2 Lima Aug. 2013
NOTA CIENTÍFICA
Flotabilidad y similitud del nado de Manta birostris (Elasmobranchii: Myliobatidae) con el ciclo de vuelo de Columba livia (Aves: Columbidae)
Buoyancy and similarity of the swimming of Manta birostris (Elasmobranchii: Myliobatidae) with the flying cycle of Columba livia (Aves: Columbidae)
Iván Meza Vélez
Departamento de Paleontología de Vertebrados, Museo de Historia Natural, Universidad Nacional Mayor de San Marcos. Apartado 14-0434, Lima 14, Perú.
E-mail: imv2999@gmail.com
Resumen
Se analizó la física de la flotación en la mantarraya Manta birostris y se comparó el nado con el ciclo de vuelo de la paloma doméstica Columba livia, con la finalidad de encontrar similitudes y diferencias en las locomociones y las leyes físicas que intervienen. Se demostró que uno de los dos ciclos de nado estudiados de esta especie posee tres de las cuatro fases principales del ciclo de vuelo de la paloma doméstica. También se demostró un efecto paracaídas en M. birostris, el cual le ofrece una ventaja en su locomoción. Adicionalmente, se describió cómo el concepto físico de torque se aplica al giro de esta especie.
Palabras clave: Biomecánica, torque, vuelo, locomoción, Batoidea.
Abstract
The physics of flotation in Manta birostris was analysed and the swimming of this species was compared with the flight cycle of the common pigeon Columba livia, in order to find similarities and differences in their locomotion patterns and the laws of physics driving them. It was showed that the cycle of M. birostris has three of the main four stages of pigeons flying cycle. A Parachute effect was also demonstrated, which give an advantage on ray´s locomotion. Moreover, it was described how torque concept is applied to turn of this species.
Keywords: Biomechanics, torque, flight, Locomotion, Batoidea.
Introducción
La aplicación de conceptos y de la metodología de la física a los fenómenos biológicos, complementa el estudio y el conocimiento de los organismos. En particular, en lo relacionado a la locomoción, nos permite conocer mejor cómo es el desplazamiento, el vuelo o el nado de un animal, ya sea actual o fósil. La especialidad encargada de hacer estos estudios físicos-biológicos es la biomecánica, definida como el estudio del movimiento de los cuerpos vivos usando la ciencia de la mecánica (Hatze 1974). A su vez, la mecánica es la rama de la física dedicada a la descripción del movimiento y cómo las fuerzas producen movimiento (Knudson 2007).
Para cualquier organismo nadador se cumplen ciertos principios que deben ser considerados. Eckert et al. (1994) señalan que los animales nadadores sostienen muy poco su propio cuerpo, pues la densidad del agua de mar les ayuda a flotar, pero también les produce gran resistencia al avance, porque es una fuerza contraria a la dirección del movimiento. Además, afirman que la velocidad de un animal nadador está en función de la relación fuerza-resistencia y la fuerza es directamente proporcional a la masa muscular; para un animal grande y a una velocidad dada bajo el agua, la resistencia al avance por unidad de masa disminuye con la masa del cuerpo. Ello se debe a que, si la forma permanece constante, la superficie y el área en sección transversal (que determina la resistencia) aumentan según una función del cuadrado de alguna dimensión lineal, mientras que la masa del cuerpo (que determina la fuerza disponible) aumenta según una función de esa dimensión lineal al cubo. Así, concluyen los investigadores, un animal acuático grande puede desarrollar una fuerza mucho mayor en proporción a la que produce la resistencia al avance, por lo tanto es capaz de alcanzar mayores velocidades de natación que un animal de igual forma pero más pequeño. Por eso tenemos que peces y mamíferos grandes nadan más rápidos que sus congéneres más pequeños.
Esta resistencia también depende de otras variables como las propiedades físicas del líquido a través del cual se desplazan los animales, así la densidad influye en la locomoción de los grandes y la viscosidad en la de los animales muy pequeños (Eckert et al. 1994). Knudson (2007) sostiene que la fuerza de resistencia del fluido (FD) depende de su densidad, del área frontal del cuerpo proyectada en la dirección del flujo, del coeficiente de resistencia (Cd) y sobre todo, depende de la velocidad relativa del individuo (v2) con respecto al fluido. Según Vogel (1996) el coeficiente de resistencia depende de la forma del cuerpo y del modelo flujo.
A diferencia de un organismo marino sésil, un animal nadador está sometido a gran resistencia del medio y debe vencerla con la forma hidrodinámica de su cuerpo y la tasa de energía que gasta en propulsarse, que es producto de la resistencia y la velocidad (Vogel 1996). Además, dicha energía depende en parte del modelo de flujo que hay en el medio, ya sea turbulento o laminar, siendo este último el que menos resistencia ofrece (Eckert et al. 1994). El líquido que rodea inmediatamente a la superficie del cuerpo se mueve a su misma velocidad, mientras que el liquido a distancia no se mueve; entonces, si la transición de la velocidad del liquido es suavemente continua a medida que el líquido se aparta de la superficie del cuerpo, el flujo en la capa limítrofe se dice que es laminar, y si hay bruscos gradientes de velocidad de flujo, se dice que es turbulento (Eckert et al. 1994). El modelo de flujo está determinado no solo por la densidad y viscosidad del medio, sino también por las dimensiones y velocidad del animal; estas cuatro variables están consideradas en una relación adimensional: el denominado número de Reynolds (Vogel 1996).
La locomoción de los batoideos ha sido abordada por varios investigadores (e.g. Marey 1893, Magnan 1930, Campbell 1951, Klausewitz 1964, Roberts 1969, Daniel 1988, Heine 1992, Rosenberger & Westneat 1999, Rosenberger 2001, Wilga & Lauder 2004), quienes observaron diferentes especies para hallar patrones de movimiento de las aletas pectorales. Los batoideos tienen dos modelos básicos de nado y están en función de las aletas pectorales: la locomoción ondulatoria, llamada rajiforme (Breder 1926), y la locomoción oscilatoria, llamada mobuliforme (Webb 1994). En la ondulatoria las ondas se propagan debajo, de la parte anterior a la posterior de las aletas pectorales; en la oscilatoria, las aletas pectorales aletean de arriba hacia abajo. Este nado es considerado una forma de volar bajo el agua y el aleteo es análogo al vuelo de las aves (Rosenberger 2001). Algunas especies como Gymnura micrura, ondula las aletas pectorales en el sustrato y las oscila en la columna de agua (Rosenberger 2001). Anatómicamente, intervienen en la locomoción la morfología de las aletas pectorales, la cintura pectoral, el sistema esquelético cartilaginoso, la poderosa musculatura y un sistema nervioso especializado para este tipo de nado que sincroniza todos los movimientos (Rosenberger & Westneat 1999, Rosenberger 2001).
Esta investigación tiene como objeto de estudio a la mantarraya Manta birostris y está sustentada principalmente en los principios físicos de la locomoción del nado, para lo cual se usó la biomecánica, mas no en la anatomía funcional del sistema muscular y esquelético del animal. Los adultos de M. birostris poseen grandes aletas pectorales triangulares; a cada lado de la cabeza tienen prolongaciones, llamadas aletas cefálicas, y poseen una cola sin espina dorsal (Chirichigno 1980); crecen hasta 6.5 m de ancho de disco con un peso de 1300 kg (Figueiredo 1977). M. birostris es cosmopolita, estando distribuida sobre todo en el océano Atlántico, y en las aguas tropicales de los océanos Pacífico e Índico (Chirichigno 1980).
Este trabajo presenta tres objetivos principales: 1) Estudiar analíticamente, usando la física, la flotación o flotabilidad de Manta birostris, con el fin de demostrar un efecto paracaídas, y las ventajas que su forma plana ofrece en su locomoción, a diferencia de un pez con forma fusiforme. 2) Comparar cualitativamente la forma de nado de M. birostris con el ciclo de vuelo de la paloma doméstica Columba livia, así como los modelos de flujo de ambas especies, y encontrar las leyes físicas que intervienen en ellos. 3) Describir brevemente el giro dentro de su locomoción.
Materiales y métodos
Flotabilidad de Manta birostris.- Para analizar la flotabilidad, se utilizó la información publicada de un ejemplar de M. birostris capturado en el año 2000 en el Río de La Plata, Uruguay, correspondiente a un macho adulto de 3,15 m de longitud total (LT), 4,2 m de ancho de disco y un peso estimado de 900 kg (Milessi & Oddone 2003).
Se determinó el área (dorsal o ventral) aproximada del cuerpo de M. birostris, usando el dibujo a escala del libro de Chirichigno (1980) con los datos de ancho de disco y LT registrados por Milessi y Oddone (2003) del ejemplar adulto de Río de La Plata. El uso de las medidas y proporciones de este individuo tiene por objetivo cuantificar la demostración.
Sobre un papel milimetrado traslúcido se calcó el dibujo y se contaron los cuadrados de 1 mm2 que lo cubrían. El conteo arrojó 789 cuadrados; además, los 4.2 m de ancho de disco tenían una longitud de 58 mm en el papel. Entonces, por regla de tres simple, 1 mm equivale a 0.072413793 m. Así se tiene que 1 mm2 = 5.243757x10-3 m2. Por último, para hallar el área se multiplicó el total de mm2 que cubren a M. birostris por la anterior cifra, es decir, 789 x 5.243757x10-3 = 4.14 m2 .
Para hallar el peso en el agua se utilizó la Tabla 1 de Lingham-Soliar (2000). En ella se presenta una relación de diferentes animales marinos, con datos de peso en el aire (o fuera del agua) y peso en el agua de mar. Por simple inspección se dedujo que el peso en el agua es 1/20 del peso fuera del agua en todos los casos. Por ser una constante, se aplicó esta proporción a M. birostris.
La fuerza de flotación (FB) es una fuerza ascendente, y viene a ser la resultante de todas las presiones (o fuerzas) que el líquido ejerce sobre un objeto total o parcialmente sumergido, siendo por tanto consecuencia del Principio de Arquímedes (Resnick & Halliday 1974). Así, para analizar la fuerza de flotación (FB) de M. birostris , se utilizó este Principio, expresado como la diferencia entre el peso en el aire (W) y el peso en el agua (W), mediante la fórmula F B = W – W(Giancoli 1997).
Se hizo un análisis comparativo de la flotabilidad, para ello se comparó el cuerpo plano de M. birostris con un cuerpo fusiforme del mismo peso. Es evidente que este cuerpo hipotético tendrá un área ventral (Af: área fusiforme) menor que el área ventral de un cuerpo plano del mismo peso, en particular el de M. birostris . Esta información también se usó en la demostración del efecto paracaídas.
Para demostrar el efecto paracaídas de M. birostris, es decir, el efecto que produce el dispositivo destinado a amortiguar el movimiento vertical de un cuerpo en la atmósfera, se siguieron los siguientes pasos:
1) Se utilizó la velocidad terminal para flujos turbulentos (v), la cual se obtiene a partir de la fórmula de fuerza de resistencia (Knudson 2007), a saber:
V= √ (2FD / ρACd)
donde ρ es la densidad del fluido, A es el área de la sección transversal en la dirección del movimiento, Cd es el coeficiente de arrastre o de resistencia y FD es la fuerza de resistencia o de arrastre (Jou et al. 1994).
2) Sobre un cuerpo grande que desciende en el agua actúan la fuerza de flotación (FB), la de resistencia (FD) y el peso (mg). A medida que el objeto cae y aumenta su velocidad, aumenta también la fuerza de resistencia, hasta que la fuerza de flotación más la fuerza de resistencia (las dos hacia arriba) se hacen igual al peso del objeto en el fluido, entonces se equilibran las fuerzas. En este punto la aceleración es cero y la velocidad ya no aumenta. Esta velocidad es llamada terminal o máxima (Giancoli 1997), y tiene una fórmula cuando el flujo es laminar y el objeto es pequeño (partículas en agua), y otra cuando hay turbulencia y el cuerpo es grande. A M. birostris le corresponde la segunda fórmula. Cuando M. birostris, en el descenso, llega a la velocidad terminal, se tiene: FB + F D = mg (mg: peso en el aire del cuerpo o W). Se despeja: FD = mg – FB. Por lo tanto, por el Principio de Arquímedes (Giancoli 1997), es decir, reemplazando FB = W – W en la ecuación de FD, se obtiene que FD es igual al peso del objeto en el agua, es decir, FD = W. Después se usará en Resultados dos veces la fórmula de v: para M. birostris y para la forma fusiforme hipotética, v M y vf respectivamente.
Locomoción y comparación del nado de M. birostris con el vuelo de la paloma doméstica Columba livia
Comparación de los modelos de flujo.- Esta investigación estudió, de manera básica, el modelo de flujo en ambas especies. Para comparar los modelos de flujo de la locomoción de
M. birostris y de la paloma doméstica, se utilizó el número de Reynolds (Vogel 1996), que considera las diferencias físicas entre los medios donde se desarrollan las locomociones en estudio: el aire y el agua de mar; pero solo considera la longitud del animal. Está dado por la siguiente fórmula:
Re = ρlU / μ
Donde ρ es densidad del medio, U es velocidad del cuerpo, l es la dimensión lineal del cuerpo y μ es la viscosidad dinámica del medio.
Las unidades de μ están expresadas en Pa.s; pero teniendo en cuenta que un Pascal = 1 Pa = 1 N/m2 y un Newton es 1 N = 1 kg.m/s 2, entonces 1 PA = 1 kg/ms2 y las unidades de μ se pueden expresar de la siguiente forma: Pa.s = (kg/ms2).s = kg/ ms, lo que coincide con la forma dimensional ML-1T-1 de la viscosidad dinámica (Vogel 1996).
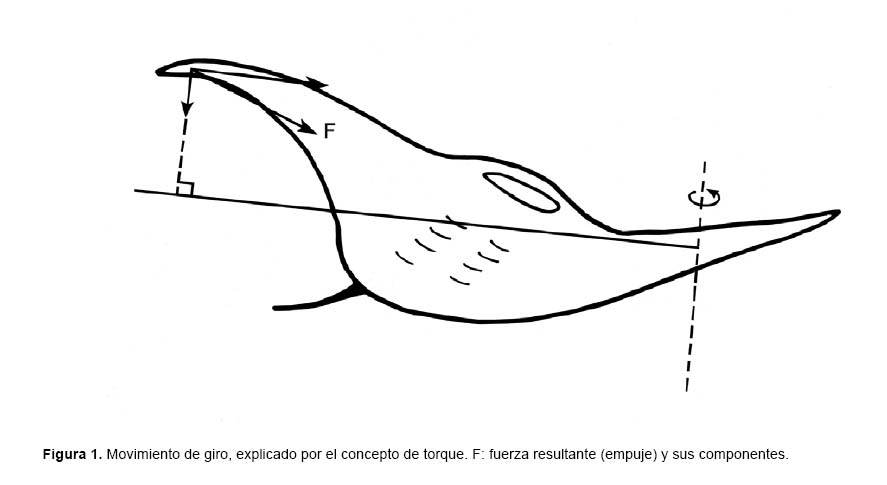
El giro de M. birostris.- Para explicar el giro de M. birostris se utilizó el concepto de torque (o momento de una fuerza) de la física. Se consideró una fuerza F que actúa en el cuerpo de la especie (actuando sobre una aleta) y que puede rotar alrededor del punto O, ubicado alrededor de la aleta opuesta. Si la proyección de la fuerza no pasa por O, entonces el efecto total será la rotación del cuerpo alrededor de O (Alonso & Finn 1999). Por la relatividad de Galileo, este punto O puede tener una velocidad relativa con respecto al fondo marino y el torque no varía.
Comparación del nado con el vuelo.- Para comparar el nado con el vuelo, se utilizó un video de Manta birostris (Mantas from Yap) de 3.62 minutos producido por Manta Visions Production (www.youtube.com/watch?v=5cP1wVZ9-dg), el cual registra imágenes submarinas captadas en las islas Yap (9º32N, 138º08E) en Micronesia. Se seleccionó este video por presentar una variada locomoción de los individuos de la especie (giro, planeo y dos ciclos de nado) y por la calidad de la filmación. En particular, para los ciclos de vuelo se utilizó el individuo que aparece en primer plano entre los minutos 248 y 254.
Para comparar el nado de M. birostris con el ciclo de vuelo de la paloma doméstica descrito por Brown (1948), se utilizó el video antes descrito con la modalidad cuadro por cuadro. De los 217 segundos del total del video se identificaron 7 segundos donde se apreciaron con claridad dos ciclos de nado, es decir, un bateo completo de las aletas hasta lograr el empuje y avance. Se aplicó la opción pausa a la imagen en los instantes más importantes para el estudio, luego se dibujó a la mantaraya estática. Se utilizaron 13 cuadros para los dos ciclos de nado estudiados.
Resultados
Flotabilidad de Manta birostris.- Para este análisis se usaron los valores del espécimen registrado por Milessi y Oddone (2003).
a) Análisis de la flotabilidad: Por el Principio de Arquímedes y su fórmula, y con los valores W=900 kgF y W=900/20 = 45 kgF (se aplica 1/20), se obtiene:
FB = 900 – 45 = 855 kgF
Por el método del papel milimetrado se determinó un área (A) aproximada (de un solo lado) de 4.14 m2 para la superficie corporal de la especie seleccionada. Para observar el efecto paracaídas se hace el siguiente análisis: al peso en el aire que M. birostris posee por unidad de área se le resta la fuerza de flotación por unidad de área. Es decir: (900/4.14)–(855/4.14) = 10.87 kgF/m2
o lo que es lo mismo W/A = 45/4.14 = 10.87. El valor de la fuerza por unidad de área de 10.87 kgF/m2 tiene la misma dirección y sentido de la gravedad.
Ahora se compara el cuerpo plano de M. birostris con uno fusiforme del mismo peso. Es evidente que este cuerpo hipotético tendrá un área ventral (Af : área fusiforme) menor que el área ventral de un cuerpo plano del mismo peso, en particular el de M. birostris , es decir, Af < 4.14 m2. Para el cuerpo fusiforme se calcula análogamente el peso por unidad de área, se obtiene: 45/Af kgF/m2. Finalmente, comparando ambos valores, 10.87 y 45/Af , y teniendo en cuenta la desigualdad A f < 4.14, obtenemos: 10.87 < 45/Af .
b) Demostración del efecto paracaídas: En la fórmula de la velocidad terminal (ver Metodología), la densidad del fluido ρ es igual para ambos casos; además, el cociente FD/A (o W/A, se demostró en la Metodología que FD = W) de la fórmula es 10.87 y 45/Af , para la mantarraya y para la forma fusiforme, respectivamente. Por otro lado, como la superficie ventral de un cuerpo fusiforme es más o menos curva hacia el dorso, entonces su Cd es menor que el Cd de M. birostris. En la Tabla 5.1 de coeficientes de arrastres de Streeter y Wylie (1981) se confirma que los valores son menores en superficies curvas que en planas orientadas en dirección del movimiento (Vogel 1996). Por simple inspección de la fórmula se observa que el valor de v sólo varía en función de FD/A y de Cd. Entonces, a mayor valor de FD/A (45/Af > 10.87) y a menor valor de Cd, se demuestra con claridad que:
vf es mayor que vM
Locomoción y comparación del nado de M. birostris con el vuelo de la paloma doméstica Columba livia
Comparación de los modelos de flujo.- Para Columba livia tenemos los siguientes valores: ρ = 1.205 kg/m3, densidad del aire a 20 ° C y 1 atm de presión (Vogel 1996); l = 0.343 m, longitud promedio del ave obtenida del rango 33 ‒35.5 cm (Schulenberg et al. 2010); U = 6 a 20 m/s, valor mínimo y máximo de C. livia en el túnel de viento (Tobalske & Dial 1996); μ = 18.08x10-6 Pa.s, viscosidad dinámica del aire a 20 °C y 1 atm de presión (Vogel 1996).
Con U mínima:
Re = (1.205 kg/m3)(0.343 m)(6 m/s)/18.08x10-6 kg/ms
Re = 137162
Con U máxima:
Re = (1.205 kg/m3)(0,343 m)(20 m/s)/18.08x10-6 kg/ms
Re = 457207
Para Manta birostris tenemos los siguientes valores: ρ = 1.024x103 kg/m3, densidad del agua de mar a 20°C y 1 atm de presión (Vogel 1996); l = 3.15 m, longitud del individuo (Milessi & Oddone 2003); U = 5.6 m/s (20 km/h), hasta esta velocidad de especimenes de M. birostris se consideró para el estudio por satélite del Argos System, los individuos con mayores velocidades fueron excluidos (Graham et al. 2012); μ = 1.072x10-3 kg/ms, viscosidad dinámica del agua de mar a 20 °C y 1 atm de presión (Vogel 1996).
Re = (1.024x103 kg/m3)(3.15 m)(5.6 m/s)/1.072x10-3 kg/ms
Re = 16850149
El giro de M. birostris .- Se observó a los 34 del video (Fig. 1) a un individuo de M. birostris que semigira hacia su izquierda. Luego de estar en avance y con movimiento en ambas aletas, M. birostris mantiene extendida y sin bateo la aleta pectoral izquierda. Sin embargo, bate ligeramente la aleta pectoral derecha y empieza a girar hacia la izquierda.
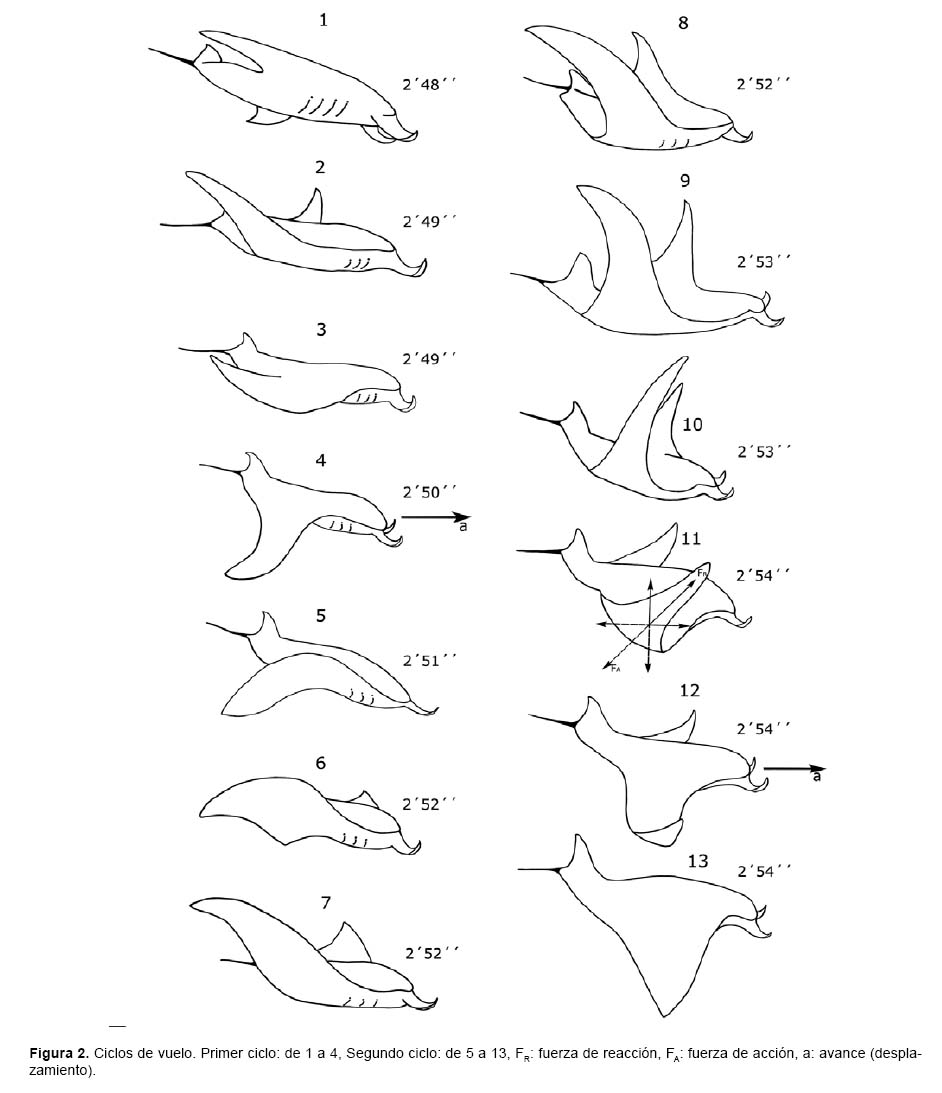
Comparación del nado con el vuelo .- El primer ciclo de nado se inicia en 248 (Fig. 2.1), se observó al individuo de M. birostris en un breve planeo. Este es el inicio de un ciclo de nado. Luego hace un ligero aleteo hacia arriba en 249 (Fig. 2.2), con el que toma impulso y bate suavemente las aletas hacia abajo y hacia atrás (Fig. 2.3), semejante a un ligero remado con el que se impulsa hacia adelante (Fig. 2.4).
El segundo ciclo de nado empieza a los 250 (Fig. 2.4). Viene del final del ciclo anterior con un movimiento de la aleta hacia abajo, y luego un movimiento ondulante hacia atrás levantando las aletas y ofreciendo la parte ventral hacia adelante y la parte distal hacia abajo (Fig. 2.5 y 2.6). Luego, en 252 la parte distal de la aleta sube y la ventral se muestra lateralmente. Aquí la aleta es llevada hacia adelante extendiéndose hacia arriba (Fig. 2.7 y 2.8). Luego, en 253 levanta completamente las aletas (Fig. 2.9). Ya extendidas las aletas en vertical, las empieza a llevar hacia adelante (Fig. 2.10), para luego bajarlas con un rápido y contundente bateo hacia atrás en 254 (Fig. 2.11 y 2.12), pero con la parte distal de las aletas flexionadas hacia arriba. Finaliza el ciclo con las aletas pectorales totalmente extendidas bajo la horizontal (Fig. 2.13).
Discusión
Flotabilidad de Manta birostris.- A diferencia de los animales marinos con el agua, en las aves en vuelo, el aire ofrece muy poco soporte de flotación o flotabilidad por su baja densidad; por consiguiente, los animales voladores deben vencer la gravedad utilizando principios de sustentación aerodinámica (Eckert et al. 1994). A diferencia de Roberts (1969), que estudió la flotabilidad y el peso en el agua y fuera de ella de especímenes de rayas eléctricas ( Torpedo nobiliana) en relación a sus órganos internos y a la densidad de sus tejidos, este estudio utilizó el Principio de Arquímedes y la velocidad terminal para analizar la fuerza de flotación en M. birostris.
Del resultado 10.87 < 45/Af se evidencia que M. birostris, que representa el valor de la izquierda de la desigualdad, reduce el peso en el agua por unidad de área con la forma plana en vez de una fusiforme (el valor de la derecha), es decir, el agua soporta menos peso por unidad de área, entonces le ofrece más resistencia al animal para hundirse.
La relación obtenida vf es mayor que vM, significa que la velocidad de hundimiento del animal con forma fusiforme es mayor que la velocidad de hundimiento de M. birostris, ambos con el mismo peso. Entonces, debido a la forma plana y de gran área del cuerpo, su velocidad de hundimiento disminuye, es decir, se produce un efecto paracaídas, lo que favorece al planeo dentro del agua. Este efecto amortigua el movimiento vertical de un objeto en un fluido, tal como ocurre con el dispositivo que se utiliza en la atmósfera. Una consecuencia del efecto paracaídas se daría en las corrientes marinas ascendentes: Manta birostris utilizaría la forma plana de su cuerpo para elevarse y dejarse llevar con mayor eficiencia que los peces de formas no planas.
Locomoción y comparación del nado de M. birostris con el vuelo de la paloma doméstica Columba livia
Manta birostris tiene numerosos movimientos que le permiten avanzar, ascender, planear, detenerse, virar (o girar), quedarse suspendido, entre otros. Un aspecto previo a tomar en cuenta en la locomoción de M. birostris, es la resistencia al avance, que está en función de la altura del cuerpo, que es baja en proporción al ancho del disco; además, las aletas presentan una altura muy reducida. Ambas estructuras tienen una morfología plana hidrodinámica. Esta poca área de la sección transversal del cuerpo en la dirección del movimiento produce una baja resistencia al avance. Esta particularidad de su morfología plana, a diferencia de la forma fusiforme de la mayoría de los peces, incide en las características de su modelo de flujo.
Comparación de los modelos de flujo.- A un bajo Re (Re<1) las fuerzas viscosas son más importantes que las inerciales, donde el cuerpo se moverá prácticamente sin inercia (Jou et al. 1994) y, además, se produce un modelo de flujo puramente laminar al pasar el líquido por su superficie (Eckert et al. 1994). Este es el caso de una larva de insecto de 0.3 mm de longitud a 1 mm/s de velocidad, cuyo Re = 0.3 (Vogel 1996). Luego, en un rango intermedio no bien definido, tanto la viscosidad como la inercia son importantes, como sucede con el vuelo de un pequeño insecto (Re = 30; Vogel 1996); pero a Re mayores que 40, empieza a aparecer turbulencia en la estela del objeto en movimiento (Eckert et al. 1994). En general, en movimientos a altos Re, la inercia es el factor importante (Jou et al. 1994) y si Re es mayor que 1000000 el fluido en contacto con el objeto se hace turbulento (Eckert et al. 1994). En este último caso se encuentra una gran libélula a 7 m/s (Re = 30000), un pato volando a 20 m/s (Re = 300000) y una gran ballena a 10 m/s (Re = 300000000; Vogel 1996). Por lo tanto, Columba livia con un Re de 137162 a 457207 y Manta birostris con Re de 16850149 se ubican en este último grupo, siendo la mantarraya la que produce mayor turbulencia; además, su inercia es más importante para su desplazamiento que en la paloma doméstica, ya que con esta inercia puede vencer la mayor densidad y viscosidad de su medio acuático. Los efectos de la inercia, debidos al momentum del animal en movimiento, son directamente proporcionales a la masa, que aumenta según el cubo de la longitud (Eckert et al. 1994). En el valor de Re y las características del modelo de flujo, la diferencia de densidades entre el aire y el agua de mar es significativa en el modelo resultante; esto se evidencia si reemplazamos el valor de la densidad del aire en la formula de M. birostris , así obtenemos para esta un valor de Re = 19829, lo que significaría un modelo de flujo menos turbulento y, por lo tanto, la mantarraya desarrollaría una mayor velocidad.
El giro de M. birostris .- A los 34 del video, el individuo no batea la aleta izquierda, entonces no hay empuje, y por la inercia el lado izquierdo queda con velocidad constante y con tendencia a disminuir por la resistencia del agua; mientras tanto, bate ligeramente la aleta pectoral derecha, lo que genera un avance por ese lado. Por lo tanto, se produce un diferencial de velocidades entre ambos, por lo que el lado de mayor velocidad gira alrededor del de menor velocidad, lo que le permite a M. birostris girar hacia la izquierda. En la aleta izquierda o cerca de ella (fuera del cuerpo) se ubica el eje de rotación, la aleta derecha en avance recibe la fuerza del empuje (Fig. 1), y el brazo de torque es la distancia entre el eje de rotación y aquella fuerza. Si la proyección o línea de acción de la fuerza no fuera perpendicular al brazo de torque, se tomará la fuerza componente que sí lo es (Alonso & Finn 1999).
Comparación del nado con el vuelo .-El primer ciclo de nado, que se inicia en 248 (Fig. 2.1) y termina en 249 (Fig. 2.3), nos muestra a un individuo de M. birostris en una locomoción de breve aleteo. Las especies con un estilo de vida pelágico, como M. birostris, nadan aleteando (flapping) sus aletas pectorales de arriba hacia abajo en un modo conocido como el nado o propulsión oscilatoria (Wilga & Lauder 2004); sin embargo, la mayoría de los batoideos tienen un nado ondulatorio, sobre todo las especies bentónicas y más sedentarias (Rosenberger 2001). Daniel (1988) usó la hidrodinámica para investigar cómo funcionan las aletas pectorales en Raja eglanteria durante la locomoción ondulatoria; este autor determinó que la especie utiliza los efectos de inestabilidad del fluido durante la locomoción para producir el empuje, y que la forma de la aleta pectoral minimiza los costos energéticos del transporte. A su vez, Rosenberger y Westneat (1999) estudiaron los patrones cinemáticos de la aleta y los patrones motores de los músculos de la aleta pectoral de Taeniura lymma; determinaron cómo estos patrones cambian con la velocidad del nado y correlacionaron la función muscular con la cinemática y la morfología pectoral. Las otras especies, dentro de las cuales hay cuatro del género Dasyatis, se ubican a lo largo del continuum de Breder (1926) ondulatorio/oscilatorio.
En el segundo ciclo del nado, el movimiento de la Fig. 2.4 a la 2.8 es equivalente al backward flick o golpe hacia atrás y hacia arriba del ciclo de vuelo de la paloma doméstica, descrito por Brown (1948). En esta fase, el ala del ave es flexionada y movida hacia atrás y hacia adelante, al mismo tiempo es extendida. Otros investigadores ya habían advertido la similitud con el vuelo, como Rosenberger (2001), quien comparó la dicotomía entre la locomoción ondulatoria y la oscilatoria entre las aletas pectorales de ocho especies de batoideos que difieren en nado, posición filogenética y estilo de vida; halló que Rhinoptera bonasus (de morfología similar a Manta birostris) es la única que presenta un nado oscilatorio, es decir, mueven las aletas pectorales hacia arriba y hacia abajo similar al vuelo de las aves. En el caso de las aves, a diferencia del nado de la mantarraya, el vuelo se produce, principalmente, por la fuerza de sustentación (Eckert et al. 1994). Los animales voladores, como las aves, murciélagos o insectos, cortan el aire con las alas y este fluye a su alrededor y crea una fuerza de sustentación que empuja las alas hacia arriba y todo lo que está anexado (Eckert et al. 1994), es decir, produce el ascenso del animal. Este ascenso es directamente proporcional a la circulación y densidad del aire, a la envergadura de las alas y a la velocidad del ave (Tobalske 2007). Spearman y Hardy (1985) afirman que, a nivel microscópico, cuando el ala se mueve a través del aire, el borde sobresaliente desplaza moléculas de aire por arriba y por debajo de la misma; y como la parte de arriba presenta una superficie curva y gruesa, ésta desvía y acelera las moléculas, lo que deja un área con menor presión con respecto a la que hay debajo del ala; esto crea un efecto de succión hacia arriba, que sumado a la mayor presión por debajo, producirá la fuerza de sustentación. La sustentación se complementa con el ciclo de vuelo que genera un empuje horizontal, produciendo el avance. En cambio, la fuerza de sustentación sobre las aletas pectorales de Manta birostris debe ser muy reducida, por carecer del típico perfil aerodinámico de un ala de ave en sección transversal. Por el alto grado de simetría que presenta la aleta, dorsal y ventralmente, la velocidad del flujo debe ser similar en ambas superficies, por lo tanto las presiones generadas también. Para M. birostris, esta fuerza es despreciable.
El movimiento en 253 (Fig. 2.9), donde levanta completamente las aletas, es similar a la fase extension o ala extendida totalmente (Brown 1948), que es equivalente a la llamada upstroke (Videler 2005). Aquí, el ala de la paloma está completamente extendida hacia arriba. Hasta este punto del ciclo, las aletas han ofrecido brevemente la cara ventral hacia la dirección del movimiento (Fig. 2.5 y 2.6), lo que produce un aumento de la resistencia (drag) del agua; pero gracias a ese movimiento logra tomar impulso para la fase siguiente, que genera el empuje (thrust). Esto da mayor velocidad al animal. En general, en los peces la producción de empuje y las estructuras que generan resistencia son inseparables (Vogel 1996). Sobre este aspecto se comparó el nado ondulatorio y el oscilatorio: el modo de nado ondulatorio es mecánicamente más eficiente a bajas velocidades y reduce la resistencia de las aletas y el cuerpo, además ofrece una alta maniobrabilidad y control (Blake 1983a,b, Lighthill & Blake 1990, Walker & Westneat 2000, Rosenberger 2001); en contraste, el mecanismo oscilatorio, como el de M. birostris, es eficiente para velocidades de crucero por el alto empuje generado, pero produce una menor maniobrabilidad (Blake 1983b, Cheng & Zhaung 1991, Rosenberger 2001). En los animales voladores, la capacidad de maniobrabilidad y de estabilidad en el aire es de gran importancia; un ave con una alta maniobrabilidad puede responder con mayor rapidez a las perturbaciones y, por lo tanto, puede mantener su ruta durante el vuelo en condiciones turbulentas (Tobalske 2007). Pero alas morfológicamente especializadas para una gran maniobrabilidad pueden comprometer otros rendimientos, como la capacidad de aceleración en el despegue (Tobalske 2007).
En general, los batoideos pueden usar una combinación de resistencia (drag), fuerza de ascenso (lift) y efectos de inestabilidad para producir el empuje (thrust) durante la locomoción (Rosenberger & Westneat 1999). La mayoría de las rayas usan el par de aletas pectorales como principal propulsor en el sistema basado en la fuerza de ascenso, sistema eficiente para altas velocidades (Vogel 1996). Webb (1979) indicó que en un sistema basado en el ascenso, el pez necesita una gran musculatura para obtener buenas aceleraciones.
Las aletas en vertical (Fig. 2.10) y el rápido y contundente bateo hacia atrás en 254 (Fig. 2.11 y 2.12), genera una fuerza en diagonal hacia atrás que produce una fuerza de reacción en sentido opuesto pero en la misma dirección. Esta fuerza tiene dos componentes, una horizontal y otra vertical (Fig. 2.11). De esta composición de fuerzas, la horizontal hacia adelante genera un considerable empuje, lo que da un sostenido avance al animal; y la vertical hacia arriba produce una fuerza de ascenso (lift) que mantiene el nivel del animal con respecto al fondo, es decir, no permite el hundimiento; aquí también participa el efecto paracaídas. Así, la velocidad se incrementa hasta superar los 20 km/h (Graham et al. 2012). Esta fase (de Fig. 2.11 a 2.13) corresponde al downstroke o golpe (remada) hacia abajo (Brown 1948): empieza con las alas del ave en vertical y terminan bajo la horizontal totalmente extendidas, como la Fig. 2.13 de M. birostris. En esta fase se presenta una diferencia, el ave desarrolla un movimiento hacia abajo pero hacia adelante, en cambio M. birostris lo realiza hacia abajo y ligeramente hacia atrás. éste es el final del segundo ciclo.
Este ciclo de la mantarraya no tiene las fases forward swing o giro hacia adelante y changeover point o punto de cambio de posición (Brown 1948) del ciclo de vuelo de la paloma. El primero precede al downstroke, incluye la retracción y rotación de las manos y termina con la inclinación del ala hacia adelante con las superficies internas paralelas (Brown 1948); en cambio, las aletas bajan hacia atrás y no pueden plegarse como el ala por carecer de una estructura ósea de tres segmentos básicos: húmero, ulna y radio, y metacarpos (mano), que hacen del ala una estructura más cinética que la aleta. El changeover point es el pequeño intervalo entre las fases forward swing y backward flick, más que una fase es un punto de cambio.
Después de un ciclo de nado, los individuos de M. birostris pueden iniciar un breve planeo con el avance conseguido. Gracias a la morfología hidrodinámica en la dirección del avance y a la gran superficie corporal plana, M. birostris logra un equilibrado y sostenido planeo. El efecto paracaídas también está involucrado en este movimiento. Rosenberger (2001) observó que Rhinoptera bonasus y Gymnura micrura se deslizaban o planeaban a través del agua, manteniendo las aletas pectorales ligeramente dobladas hacia arriba y sin movimiento. Esta posición de las aletas y la forma del disco de la mantarraya, según la autora, ofrecen un ascenso al cuerpo, lo que permite que el animal mantenga su nivel y el movimiento hacia adelante. Análogamente, muchas aves, de manera regular, usan la fase de no aleteo (planeo con las alas extendidas) para modular la potencia durante un vuelo intermitente (Tobalske 2007).
Concluyendo, el segundo ciclo tiene tres de las cuatro fases principales del vuelo de la paloma descrito por Brown (1948). Las conclusiones de este trabajo teórico deben ser demostradas experimentalmente con especímenes vivos y/o muertos, utilizando tecnología adecuada para hacer mediciones, como electrodos, la electromiografía, tanques con cámaras de video de alta velocidad en 3D, etc.
El principal aporte de este estudio es mostrar resultados significativos y verificables sobre los organismos, fruto del trabajo interdisciplinario entre la física y la biología; en particular, la comprensión de la flotabilidad de M. birostris y la similitud del nado con el vuelo de la paloma doméstica Columba livia. Estos patrones similares de movimientos nos generan otras preguntas sobre el origen ancestral de ambas locomociones. Finalmente, la conducta de un pez o un ave están, en parte, determinadas por sus capacidades y limitaciones físicas; de la comprensión integral de estas podremos entender mejor el comportamiento animal.
Agradecimientos
A Rafael Varas por la traducción del resumen al inglés. Agradecimientos a Carlos Peña, Leonardo Romero, José Roque, Marcelo Stucchi, Walter Cabrera y Diego Montalti, por la revisión del manuscrito y/o por la bibliografía proporcionada. También al físico Luciano Stucchi, por el visto bueno a los aspectos físicos del trabajo.
Literatura citada
Alonso M. & E. Finn. 1999. Física, volumen I: Mecánica. Addison-Wesley Longman. México. 530 pp. [ Links ]
Blake R.W. 1983a. Swimming in the electric eels and knifefishes. Canadian Journal of Zoology 61: 1432-1441. [ Links ]
Blake R.W. 1983b. Median and paired fin propulsion. En: Fish Biomechanics (Ed. P. W. Webb y D. Weihs). Praeger. Pp. 215-247. [ Links ]
Breder C.M. 1926. The locomotion of fishes. Zoologica 50: 159-297. [ Links ]
Brown R.H.J. 1948. The flight of birds, the flapping cycle of the pigeon. Journal of Experimental Biology 25: 322-333. [ Links ]
Campbell B. 1951. The locomotor behavior of spinal elasmobranchs with an analysis of stinging in Urobatis. Copeia 1951: 277-284. [ Links ]
Cheng J., L. Zhuang & B.Tong. 1991. Analysis of swimming three-dimensional waving plates. Journal of Fluid Mechanics 232: 341-355. [ Links ]
Chirichigno N. 1980. Clave para identificar los peces marinos del Perú. Instituto del Mar del Perú. Informe 44:1-388. [ Links ]
Daniel T.L. 1988. Forward flapping flight from flexible fins. Canadian Journal of Zoology 66: 630-638. [ Links ]
Eckert R., D. Randall & G. Augustine. 1994. Fisiología animal. 3a Ed. Interamericana-McGraw-Hill. 683 pp. [ Links ]
Figueiredo L. 1977. Manual de peixes marinhos do sudeste do Brasil. Introdução o caçoes, raias e quimeras. Museu de Zoología da Universidade de São Paulo. 104 pp. [ Links ]
Giancoli D. 1997. Física, principios con aplicaciones. 4 a Ed. Pearson Educación. México. 785 pp. [ Links ]
Graham R., M. Witt, D. Castellanos et al. 2012. Satellite tracking of manta rays highlights challenges to their conservation. PloS ONE 7(5): e36834. doi :10.1371/journal.pone.0036834 [ Links ]
Hatze H. 1974. The meaning of the term: Biomechanics. Journal of Biomechanics 7: 189-190. [ Links ]
Heine C. 1992. Mechanics of flapping fin locomotion in the cownose ray, Rhinoptera bonasus (Elasmobranchii: Myliobatidae). PhD thesis. Duke University. Durham. NC. EE.UU. (289). [ Links ]
Jou D., J. Llebot & C. Perez. 1994. Física para ciencias de la vida. McGraw-Hill. Madrid. 526 pp. [ Links ]
Klausewitz W. 1964. Der lokomotionsmodus der flugelrochen (Myliobatoidei). Zoologischer Anzeiger 173: 110-120. [ Links ]
Knudson D. 2007. Fundamentals of biomechanics. 2a Ed. Springer. New York. 350 pp. [ Links ]
Lighthill J. & R.W. Blake. 1990. Biofluiddynamics of balistiform and gymnotiform locomotion. Part 1. Biological background and analysis of elongated-body theory. Journal of Fluid Mechanics 212: 183-207.
Lingham-Soliar T. 2000. Plesiosaur locomotion: Is the four-wing problem real or merely an atheoretical exercise? Neues Jahrbuch für Geologie und Paläontologie 217(1): 45-87.
Magnan A. 1930. Les caracteristiques geometriques et physiques des poissons. Deuxieme partie. Annales des Sciences Naturelles. Zoologie 13 : 134-269. [ Links ] [ Links ]
Mantas From Yap. (en línea) http://www.bigblueimages.com. Acceso no libre. http://www.youtube.com/watch?v=5cP1wVZ9-dg (acceso 20/04/2009).
Marey E.J. 1893. Des mouvements de natation de la raie. Comptes Rendus de lAcadémie des Sciences, Paris 116 : 77-81. [ Links ]
Milessi A. & M. Oddone. 2003. Primer registro de Manta birostris (Donndorff, 1798) (Batoideo: mobulidae) en el Río de La Plata, Uruguay. Gayana 67 (1):127-130. [ Links ]
Resnick R. & D. Halliday. 1974. Física, parte I. 8a Ed. CECSA. México. 922 pp. [ Links ]
Roberts B.L. 1969. The buoyancy and locomotory movements of electric rays. Journal of the Marine Biological Association of the United Kingdom 49: 621-640. [ Links ]
Rosenberger L.J. & M.W. Westneat. 1999. Functional morphology of undulatory pectoral fin locomotion in the stingray Taeniura lymma . Journal of Experimental Biology 202: 3523-3539. [ Links ]
Rosenberger L.J. 2001. Pectoral fin locomotion in batoid fishes: undulation versus oscillation. Journal of Experimental Biology 204: 379-394. [ Links ]
Schulenberg T., D. Stotz, D. Lane et al. 2010. Aves de Perú, 1a Ed. CORBIDI. Lima. 660 pp. [ Links ]
Spearman R. & J. Hardy. 1985. Integument. En: Form and function in birds. Edited by A.S. King & J. McClelland. Vol III. Academic Press. 522 pp. [ Links ]
Streeter V. & E. Wylie. 1981. Mecánica de los fluidos. 6a Ed. McGraw-Hill. Bogota. 775 pp. [ Links ]
Tobalske B. & K. Dial. 1996. Flight kinematics of black-billed magpies and pigeons over a wide range of speeds. Journal of Experimental Biology 199: 263-280. [ Links ]
Tobalske B. 2007. Biomechanics of bird flight. Journal of Experimental Biology 210: 3135-3146. [ Links ]
Videler J. 2005. Avian Flight. Oxford University Press. New York. 258 pp. [ Links ]
Vogel S. 1996. Life in Moving Fluids: the physical biology of flow. 2a Ed. Princeton: Princeton University Press. 467 pp. [ Links ]
Walker J.A. & M.W. Westneat. 2000. Mechanical performance of aquatic rowing and flying. Proceedings of the Royal Society of London, Series B 267: 1875-1881. [ Links ]
Webb P.W. 1994. The biology of fish swimming. En: Mechanics and Physiology of Animal Swimming (Ed. L. Maddock, Q. Bone and J.M.V. Rayner). Cambridge: Cambridge University Press. Pp. 45-62. [ Links ]
Wilga C.A. & G.V. Lauder. 2004. Biomechanics of locomotion in sharks, rays, and chimeras. En: Biology of Sharks and their Relatives. CRC Press LLC. Pp. 139-164. [ Links ]
Presentado: 28/01/2013
Aceptado: 24/07/2013
Publicado online: 09/12/2013
