









Services on Demand
Journal

Article
 English (pdf)
English (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mailIndicators
-
 Cited by SciELO
Cited by SciELO
Related links
-
 Similars in
SciELO
Similars in
SciELO
Share

 Permalink
PermalinkRevista de Gastroenterología del Perú
Print version ISSN 1022-5129
Rev. gastroenterol. Perú vol.34 no.4 Lima Oct. 2014
Entrenamiento en endoscopia con modelos “ex vivo” y “simuladores virtuales”: nuevos métodos de enseñanza
Endoscopy training by using ex vivo and simulators: a new teaching tool
Everson L.A. Artifon 1,2, Asadur J. Tchekmedyian 3, Kaie Fernandes 4, Aline N. Artifon 5, Alvaro Fonseca 6, Jose P. Otoch 7
1 Jefe del Servicio de Endoscopía, Hospital Ana Costa. Santos, Sao Paulo, Brasil.
2 Coordinador del Sector de Endoscopia Biliopancreática, Servicio de Endoscopia, Hospital de Clínicas, Facultad de Medicina, Universidad de Sao Paulo. Sao Paulo, Brasil.
3 Gastroenterólogo del Hospital Pasteur, Ministerio de Salud Pública. Montevideo, Uruguay.
4 Alumno de post grado. Facultad de Medicina, Universidad de Sao Paulo. Sao Paulo, Brasil.
5 Geriatra del Hospital de Amil. Sao Paulo, Brasil
6 Gastroenterólogo. Montevideo, Uruguay.
7 Profesor del Depar tamento de Cirugía, Universidad de Sao Paulo. Regente de la Disciplina de Técnica Cirugía y Experimental, Universidad de Sao Paulo. Sao Paulo, Brasil.
RESUMEN
En las últimas décadas, el modelo tradicional de enseñanza de la endoscopia digestiva ha sido en base al método tutorial profesor-alumno, basado en modelos teóricos. Hoy en día, los simuladores presentan las ventajas de la realidad virtual. El aparato manipulado es similar al utilizado en la práctica clínica, es seguro, lo que permite un uso ilimitado, con mejor costo- beneficio para las instituciones y con un rendimiento superior con respecto a otros modelos de entrenamiento. Por otra parte, los simuladores biológicos son una herramienta viable, accesible y asequible para simular lesiones gastrointestinales, lo que permite la formación en endoscopia con un alto grado de similitud en el aspecto endoscópico. En la presente revisión, analizamos ambos modelos, presentando sus ventajas para el entrenamiento del endoscopista de los tiempos actuales.
Palabras clave: Endoscopia; Entrenamiento; Enseñanza (fuente: DeCS BIREME).ABSTRACT
In recent decades, the traditional teaching model of gastrointestinal endoscopy has been based on the teacher-student tutorial method based on theoretical models. Today, simulators have the advantages of virtual reality. The handling apparatus is similar to that used in clinical practice; it is safe, which allows unlimited use, cost-effective for institutions and with superior performance over other training models. Besides, biological simulators are a viable, accessible and affordable tool to simulate gastrointestinal lesions, allowing training in endoscopy with a high degree of similarity in the endoscopic appearance. In this review, we analyze both models, showing its advantages for the training of the endoscopist of the times.
Key words: Endoscopy; Training; Teaching (source: MeSH NLM).INTRODUCCIÓN
En las últimas décadas, el modelo tradicional de enseñanza de la endoscopia digestiva ha sido en base al método tutorial profesor-alumno, basado en modelos teóricos. Por otra parte existen los cursos en vivo con pacientes reales. Estas modalidades enfrentan problemas mensurables y de reproductibilidad, especialmente cuando se refiere a la habilidad endoscópica (1). Dicha habilidad es medida en base a los resultados del endoscopista, una condición que depende de las características individuales del médico en formación, la complejidad de la patología y de los recursos materiales (endoscopios, accesorios, etc.) así como de los modelos de formación (2).
Los trabajos que evaluan la experiencia en endoscopia son relativamente recientes y han demostrado la necesidad de una serie de procedimientos para medir
la capacidad y valorar la concurrencia en el ámbito médico-legal de la endoscopia digestiva (3).
El número de casos clínicos es variable en los diferentes hospitales y centros universitarios, no obstante, el aprendizaje depende de ciertas condiciones como la organización local de cada programa de formación, de principios éticos y del marco legal del centro de enseñanza, así como de la posibilidad de instrucción básica y la presencia de un supervisor (4).
Las pautas nacionales con recomendaciones sobre la adquisición de destrezas no son fácilmente implementadas en la práctica médica (5). El British Joint Advisory Group on Gastrointestinal Endoscopy desarrollo recomendaciones para el entrenamiento. Pese a ello, en Gran Bretaña, solo el 40% de los endoscopistas tiene un entrenamiento formal y de estos apenas el 17% siguen las recomendaciones recibidas durante su formación.
Actualmente los simuladores de animales son utilizados en varias áreas de la medicina como en laparoscopia, cardiología, cirugía y anestesiología (6). Es así que animales como cerdos, perros, ovejas y gatos son utilizados para el entrenamiento en endoscopia. De todas maneras, tanto en América del Norte como en Europa no tuvieron gran popularidad dado su escasa disponibilidad. Una excepción es el “Active Erlangen Simulator for Interventional Endoscopy” (7) (en que el tracto digestivo y el pancreático-biliar es obtenido de modelos caninos) el cual está constituido por un sistema que combina la endoscopia virtual con un modelo biológico, permitiendo la formación y competencia de la endoscopia terapéutica en un sistema virtual. No obstante el costo de este recurso es muy elevado y solo está disponible en centros de formación de endoscopia de países Europeos.
En nuestro centro, venimos realizando el entrenamiento mediante modelos ex-vivo y simuladores virtuales según detallamos a continuación.
En una primera instancia el alumno realiza sus maniobras en un simulador, luego pasa a los modelos animales, para finalmente realizar las maniobras en pacientes reales. De esta manera se busca minimizar los problemas de iniciar el entrenamiento directamente en seres humanos.
SIMULADOR VIRTUAL
Introducción
Nos encontramos en la era de la cirugía mínimamente invasiva y en este contexto la endoscopia gastrointestinal (endoscopia digestiva alta, colonoscopia, colangiopancreatografía retrógrada endoscópica y ultrasonido endoscópico) juega un rol importante en el tratamiento de diversas enfermedades gastrointestinales. Procedimientos tales como resección del cáncer en estadio temprano, drenajes para paliar estenosis malignas del conducto biliar y/o pancreático, drenaje de pseudoquistes y procedimientos parar estenosis benignas son algunos ejemplos de trastornos susceptibles de tratamiento endoscópico.
El objetivo principal del programa de formación, definidos por las sociedades internacionales de endoscopia gastrointestinal, confiere seguridad de que los profesionales en formación sean capaces de realizar exámenes y procedimientos endoscópicos de forma segura, rápida y con claro dominio de la técnica.
La evaluación objetiva de la adquisición de habilidades en el entrenamiento para los procedimientos quirúrgicos endoscópicos se determina por un número mínimo de procedimientos, con los cuales (en teoría) se obtiene el dominio de la técnica.
La adquisición de la competencia en la realización de un procedimiento depende de la curva de aprendizaje de cada individuo. Por tanto, los métodos estándar de evaluación de desempeño son necesarios e independientes del número de procedimientos realizados en el ámbito clínico previamente proporcionados por el simulador bajo la supervisión de un experto de capacidad ya establecida.
En un ambiente universitario, hay disciplinas médicas que además de la carga horaria teórica, necesitan modelos para la enseñanza de habilidades relacionadas con su campo de actuación.
Es de destacar el modelo de material ex-vivo, establecido desde hace años en las especialidades que requieren procedimientos. Estos modelos presentan la ventaja de la enseñanza individualizada, continua y sostenidamente evolutiva. Sin embargo, el modelo de simulación virtual ha merecido un lugar considerable, teniendo en cuenta el desarrollo tecnológico de las últimas dos décadas. En este contexto, la formación previa en el simulador virtual ofrece la ventaja de excluir a los pacientes de la curva de aprendizaje inicial. Esto puede evitar el malestar de los pacientes por la escasa experiencia de los profesionales en las primeras etapas de la adquisición de destrezas en los procedimientos básicos en el proceso de capacitación.
La capacitación del profesional en formación, sobre todo en endoscopia digestiva, se realiza tradicionalmente en los pacientes bajo la supervisión de médicos especialistas en un ambiente clínico (entrenamiento convencional). Sin embargo, tiene desventajas como aumento de la duración de los procedimientos, la disponibilidad del paciente, el riesgo de complicaciones e implicaciones económicas. Los simuladores endoscópicos se han desarrollado con el fin de minimizar estas posibles limitaciones para el aprendizaje.
El Comité de Tecnología de la “Aerican Society for Gastrointestinal Endoscopy” recientemente llevó a cabo una extensa revisión de la literatura con el objetivo de investigar nuevas modalidades tecnológicas de impacto en la práctica de la endoscopia.
Los simuladores son modelos que intentan reproducir la realidad para el aprendizaje y el entrenamiento, así como para promover la mejora de las habilidades previamente adquiridas. Los primeros simuladores quirúrgicos y endoscópicos fueron descritos en 1969 y a lo largo de la década del setenta. El desarrollo tecnológico en los últimos años ha permitido la evolución de estos dispositivos, existiendo actualmente simuladores complejos y de alta tecnología orientada a la didáctica.
Hay cuatro categorías de simuladores aplicados a la cirugía y endoscopia digestiva: simuladores mecánicos, modelos animales, simuladores compuestos y simuladores computadorizados virtuales.
Modelo mecánico:
El primer simulador mecánico para la formación endoscópica fue construido de plástico y descrito en 1974. El modelo mecánico tiene la desventaja de no representar idealmente la realidad, ya que no reproduce consistentemente los tejidos humanos. El mismo ha sido sustituido por modelos animales o simuladores computadorizados virtuales.
Simulador vivo - modelo animal:
El modelo animal proporciona la mejor correlación con la realidad. La sensibilidad táctil es prácticamente idéntica al tejido humano, aunque pueden existir diferencias en el espesor y la orientación anatómica de los órganos. El modelo porcino se ha utilizado como una opción de simulación en cirugía y endoscopia digestiva. Sin embargo, existen desventajas, como la necesidad de una infraestructura específica, altos gastos financieros y las limitaciones éticas como consecuencia de la cantidad y tipo de animales que se necesitan para la enseñanza o experimento.
Simulador mecánico combinado con órganos de animales explantados:
Los simuladores compuestos se fabrican a través de la composición de pequeños receptáculos de piezas de plástico que permite conexiones a los órganos animales explantados. Antes de su uso, los órganos del tracto digestivo son especialmente preparados y colocados en el interior del espacio que representa la cavidad abdominal del dispositivo. Las ventajas incluyen una realidad simulada mayor en comparación con el modelo mecánico y la posibilidad de efectuar procedimientos terapéuticos sin daño al paciente. Como desventaja necesita una preparación dispendiosa, la necesidad de la disponibilidad de órganos y características adversas de algunos órganos y/o tejidos implantados.
Simulador computarizado:
Los simuladores computadorizados fueron desarrollados en los años 80. Desde entonces, con la evolución de la tecnología del software, se han transformados en dispositivos cada vez más reales. La interacción de la tecnología virtual con imágenes quirúrgicas y endoscópicas almacenadas en el dispositivo permite la transmisión en tiempo real de los movimientos realizados con los instrumentos y los accesorios tanto endoscópicos como quirúrgicos. Los aspectos técnicos del entrenamiento son registrados gráficamente y almacenados en la memoria del disco
duro del simulador para evaluar el desempeño y el desarrollo de las habilidades adquiridas. El simulador virtual “GI - Bronch Mentor” (Simbionix®) consta de un maniquí de plástico que permite, a través de sensores internos, la percepción táctil en el momento de la cirugía y/o la endoscopia para diagnóstico y tratamiento (Figura 1). El sistema está integrado con un dispositivo de endoscopia (Pentax, ECS- 3840F) para la simulación de endoscopia digestiva alta y baja, un duodenoscopio (Pentax ED- 3440T) para la colangiografía retrógrada endoscópica (CPER) y un ecoendoscopio para la ultrasonografía endoscópica (USE).
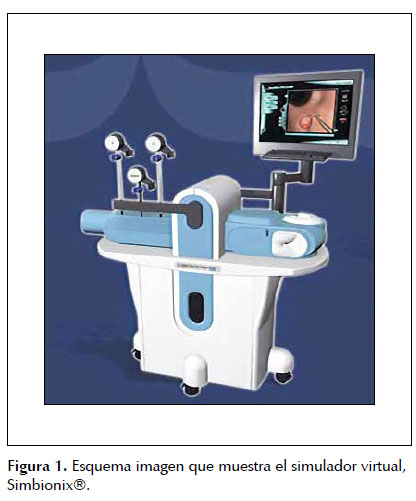
En el extremo del dispositivo del endoscopio existen sensores que permiten al ordenador generar una visión quirúrgica o endoscópica dinámica en respuesta a los movimientos realizados por el usuario. Este modelo posibilita la utilización repetida sin la necesidad de una preparación previa.
En relación a la formación en endoscopia terapéutica este equipo permite una variedad de posibilidades muy amplia, con diferentes grados de dificultad y complejidad. La caracterización de la habilidad y su desarrollo y evolución se muestran a través de gráficos calculados por el software que se obtienen al final del examen.
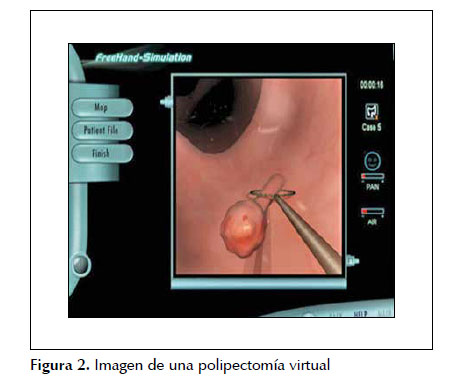
El simulador de realidad virtual incluye programas con imágenes transmitidas en 3D que demuestran detalles de las características anatómicas, hallazgos patológicos, indicaciones, contraindicaciones y complicaciones asociados a cada contexto y al procedimiento correspondiente (Figura 2). También incluye videos instructivos que demuestran cómo manejar los instrumentos quirúrgicos y endoscópicos.
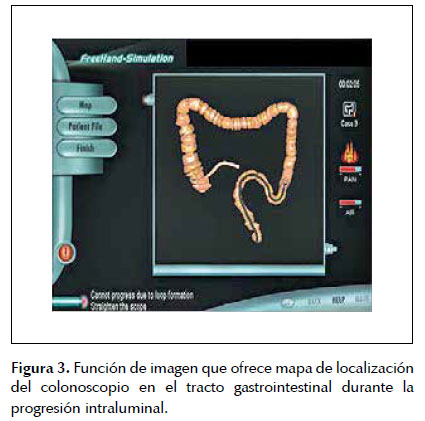
El modelo también proporciona orientación durante el examen virtual como demostración de las técnicas y las dificultades para avanzar con el endoscopio en la luz intestinal (Figura 3). Durante el procedimiento la luz virtual se colapsa y se expande con la insuflación y la aspiración de los equipos, mientras tanto el simulador puede responder a través de la emisión de un sonido ante la existencia de dolor o incluso la necesidad de terminar el procedimiento por intolerancia. Las complicaciones como perforación, hemorragia y reacción vaso-vagal también se demuestran por el simulador.
Al final de la formación los parámetros de rendimiento se almacenan en el sistema e incluyen el tiempo del procedimiento, el reconocimiento de los hallazgos diagnósticos, los grados de insuflación, el porcentaje de la mucosa visualizada, la incomodidad del paciente, el uso de asistente médico virtual y la capacidad de realizar maniobras y procedimientos endoscópicos quirúrgicos.
Este método de enseñanza tiene las ventajas de la realidad virtual. El aparato manipulado es similar al utilizado en la práctica clínica, es seguro, lo que permite un uso ilimitado, con mejor costo-beneficio para las instituciones y con un rendimiento superior con respecto a otros modelos de entrenamiento.
ENSEÑANZA CON MODELOS ex-vivo
Descripción del maniquí
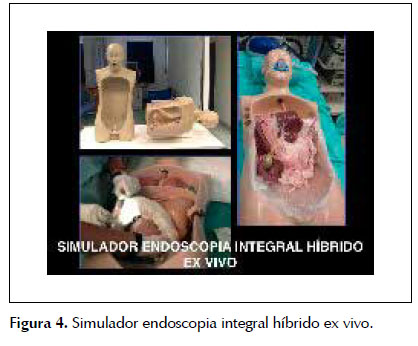
De manera de evaluar este sistema, se diseñó un modelo de fibra de vidrio, rígido, con forma humana, que incluye cabeza, tronco y el abdomen. La cavidad abdominal fue anatómicamente diseñada, similar a la del adulto, con sus cavidades correspondientes (esófago, estómago, duodeno y segmento hepatobiliar) y con hendiduras que permiten el acceso de material para el sistema de electrocoagulación convencional.
Descripción del modelo ex-vivo
Se obtuvieron órganos extraídos del tracto digestivo de cerdos, perros y ganado vacuno, para lo cual se seleccionaron bloques de tejido que incluyen esófago, estómago y duodeno (canino y porcino), segmentos de intestino delgado y grueso (vacuno) y tejido hepatobiliar (vacuno), que contenía el hígado y la vesícula biliar in situ. Los bloques de tejido fueron almacenados a
-40 °C durante 48 horas para el transporte, ya que las lesiones simuladas se prepararon 2 días antes de su uso. Mediante inmersión se descongelaron en agua a
45 °C durante 2 horas para recuperar su consistencia habitual. Cada segmento se colocó en un recipiente de plástico y se realizó minuciosa e intensa limpieza de las secreciones mediante irrigación de una solución de bicarbonato de sodio y agua (Figura 4).
Preparación de la lesión
En la preparación de los segmentos de esófago, estómago, duodeno y colon se utilizaron segmentos de tejido de modelos porcinos, para la preparación del colon además se utilizó material vacuno.
TIPO Y DESCRIPCIÓN DE LAS LESIONES
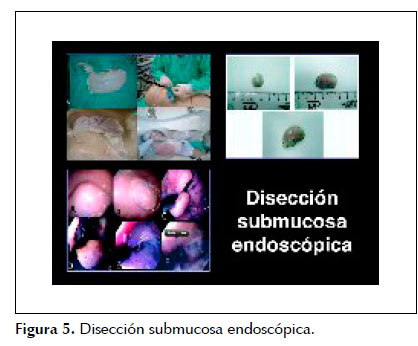
1. Lesiones submucosas de esófago y estómago
Para generar este tipo de lesiones se realizó la inyección submucosa de 1,2 y 5 ml de solución de aceite instilada tangencialmente desde el exterior del esófago y estómago respectivamente, mediante una aguja calibre 14. De esta manera, se crearon lesiones submucosas de 1 a 3 cm de diámetro, que fueron distribuidas en el esófago distal, fundus, cuerpo, antro y curvaturas gástricas en forma aleatoria (Figura 5).
2. Lesiones hemorrágicas no varicosa
Mediante la colocación de 10 catéteres de plástico en la submucosa y 21 medidores de flujo conectados a un sistema de irrigación intermitente, se instiló una solución de coloración roja simulando la existencia de lesiones hemorrágicas distribuidas en el fondo, cuerpo, antro y curvaturas gástricas de forma aleatoria. Dicha instilación fue manipulada por un solo técnico que ajustó la velocidad y el flujo del volumen.
3. Pseudoquiste pancreático
Para generar esta lesión se rellenó con 30 ml de glicerina al 2% un segmento de 20 cm de longitud de colon porcino. Sus extremos fueron ligados con sutura de seda 00. Dicho segmento se colocó adyacente a la serosa de la pared posterior del estómago, simulando una compresión extrínseca. El espacio entre las dos vísceras se cerró con puntos no visibles desde la perspectiva del endoscopista.
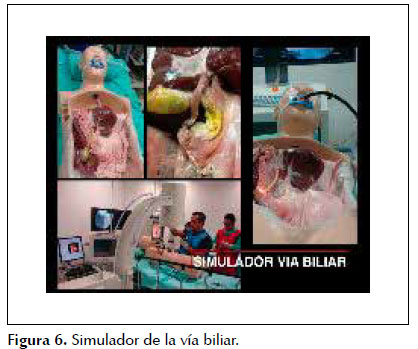
4. Coledocolitiasis y litiasis intrahepática
Para ello se utilizaron segmentos de la región hepatobiliar del modelo vacuno, incluyendo el área antro-duodenal sin separar el conducto biliar. Se realizó una colédoco-entero anastomosis de un plano con sutura de seda 00, con la reconstrucción de la papila, que permitió el paso del endoscopio. El diámetro
medio de la vía biliar extrahepática fue de 2 cm. Fueron colocados en su interior cálculos extraídos de vesículas biliares humanas extirpadas en procedimientos de coordinación tradicionales (Figura 6).
5. Ultrasonografía endoscópica (USE)
Fueron utilizados los mismos segmentos de esófago, estómago e intestino delgado, incluyendo el sistema hepatobiliar sumergidos en gelatina de consistencia semi-sólida para lograr la transmisión del sonido y la evaluación de las patologías previamente establecidas. (Figura 7).

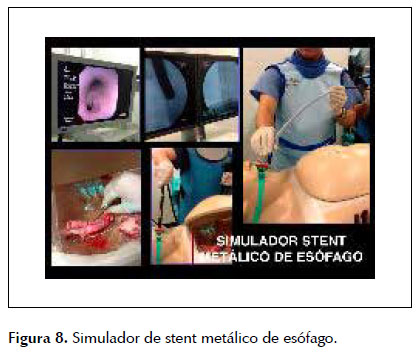
6. Estenosis y fístula traqueo-esofágica
La patología del esófago se realizó con el mismo segmento de órgano porcino mediante la compresión externa en el tercio medio del esófago con una banda elástica causando una estenosis. La fístula traqueo- esofágica se realizó con anastomosis traqueal de un segmento del esófago con el hilo de nylon 00 (Figura 8).
INTERVENCIÓN EDUCATIVA
Para evaluar el modelo descripto, participaron 270 médicos, que incluyeron a residentes y alumnos de posgrado. Las variables consideradas fueron la semejanza al aspecto endoscópico humano, como la consistencia de los órganos y la utilidad de los instrumentos endoscópicos (agujas de inyección, catéter de irrigación, pinzas de biopsia, balones de dilatación, hemoclips, argón plasma, prótesis esofágica, ecoendoscópico y enteroscopia).
Utilizando la escala de Likert, se realizo una encuesta a médicos endoscopistas entrenados con el fin de evaluar el grado de acuerdo o desacuerdo en relación al aspecto endoscópico humano y el modelo biológico de lesiones submucosas, lesiones hemorrágicas y las compresiones extrínsecas.
RESULTADOS
De acuerdo con la escala de Likert para el modelo utilizado, los médicos endoscopistas respondieron estar de acuerdo en el 94% en relación a las lesiones submucosas de las vías biliares, enteroscopia y EUS y en desacuerdo con la similitud del modelo en humanos en el 6%. Para las lesiones hemorrágicas están totalmente de acuerdo el 86,5% mientras que el 13,5% no estuvieron de acuerdo. En lo que se refiere a las lesiones por compresión extrínseca el 88,2% estuvieron de acuerdo y el 11,8% en desacuerdo. Para el esófago y el estómago, el modelo canino tuvo una mayor similitud con los seres humanos debido al espesor de la pared, así como las características de las secreciones intracavitarias.
Recientemente el perfeccionamiento de los simuladores mecánicos abrió un panorama potencial de habilidades de capacitación y enseñanza en la endoscopia diagnóstica y terapéutica, condiciones que permiten que el simulador se aproxime cada vez
más a la anatomía humana real. Por otra parte, los modelos animales son más realistas y también satisfacen las condiciones necesarias para el entrenamiento endoscópico. Una de las características de los hospitales docentes y la escuela de medicina es la viabilidad de la adquisición de diferentes modelos de animales vivos y mantenidos en instalaciones adecuadas, situación que favorece la investigación y la formación en el desarrollo de habilidades en la endoscopia diagnóstica y terapéutica.
Los simuladores biológicos inanimados son una alternativa viable y de fácil acceso para la simulación de lesiones del tracto digestivo y pancreatobiliares. Lesiones simuladas como sangrado gástrico submucoso o lesiones secundarias a una compresión extrínseca como el pseudoquiste pancreático son virtualmente indistinguibles de las que aparecen en el ser humano. El aspecto endoscópico de la patología biliar simulada se asemeja al hallazgo coledocoscópico como el de la litiasis bilar. Además, el modelo permite la práctica de habilidades de endoscopia para simulación y descripción de lesiones intraluminales, así como realizar procedimientos terapéuticos con mayores habilidades sin el riesgo que implicaría el procedimiento en el paciente real. El entrenamiento permite la realización de un número ilimitado de procedimientos y consecuentemente desarrollar habilidades, conocer los accesorios e instrumentos necesarios y adecuados y evaluar las posibles complicaciones relacionadas con el procedimiento, permitiendo la revisión de la parte tratada.
Por otra parte, se puede practicar bajo supervisión las diferentes técnicas de resección endoscópica de la mucosa, el tratamiento de lesiones sangrantes, drenaje de pseudoquistes, etc.
Las ventajas de este modelo son: 1) la creación de diferentes lesiones no requieren grandes recursos tecnológicos, 2) en un mismo segmento de tejido (esófago, estómago o duodeno) se pueden fabricar varias lesiones localizadas en lugares específicos, en función de la complejidad y la dificultad requerida para el envío, y 3) lesiones con diferente forma y tamaño.
Otra ventaja de este tipo de recurso, y posiblemente el más importante, es que, en nuestro país, en los centros universitarios donde se realiza entrenamiento endoscópico no se dispone todavía de modelos virtuales de software de alta tecnología y alto costo, por lo que los simuladores de modelos animales ex vivo son una herramienta difícil de superar para la formación y capacitación de los recursos humanos, como condición básica propuesta en los programas educativos endoscopia. En suma, estos modelos podrían cambiar los sistemas de educación. Con una formación previa en estos modelos se podría optimizar los recursos y reducir el riesgo de complicaciones en los pacientes con un programa de aprendizaje rápido en fases iniciales y optimizando las habilidades terapéuticas para los endoscopistas experimentados.
Los simuladores biológicos son una herramienta viable, accesible y asequible para simular lesiones gastrointestinales reproducibles, lo que permite la formación en endoscopia con un alto grado de similitud en el aspecto endoscópico. La adquisición y desarrollo de habilidades es una de las variables en la enseñanza y aprendizaje difícil de medir en la medicina clínica. Sin embargo, la tendencia actual de los conocimientos sobre medicina basada en la evidencia debe ser acompañada por profesores experimentados, para que nuestra propuesta de desarrollar herramientas y recursos para estas situaciones sea con menor riesgo para el paciente durante la formación de recursos humanos para la salud.
Conflictos de intereses: Los autores declaran no tener conflictos de interés.Agradecimiento:
A la Dra. Florencia Eula por su apoyo en la traducción del material.
BIBLIOGRAFÍA
1. Bar-Meir S. A new endoscopic simulator. Endoscopy. 2000 Nov;32(11):898-900.2. Grober ED, Hamstra SJ, Wanzel KR, Reznick RK, Matsumoto ED, Sidhu RS, et al. The educational impact of bench model fidelity on the acquisition of technical skill: the use of clinically relevant outcome measures. Ann Surg. 2004 Aug;240(2):374-81.
3. Aabakken L, Adamsen S, Kruse A. Performance of a colonoscopic simulator: experience from a hands-on endoscopy course. Endoscopy. 2000 Nov;32(11):911-3
4. Bhangu A, Bowley DM, Horner R, Baranowski E, Raman S, Karandikar S. Volume and accreditation, but not specialty, affect quality standards in colonoscopy. Br J Surg.2012;99:1436-44
5. Barton JR1, Corbett S, van der Vleuten CP The validity and reliability of a Direct Observation of Procedural Skills assessment tool: assessing colonoscopic skills of senior endoscopists. Gastrointest Endosc. 2012;75:591-7
6. Conio M, Sorbi D, Batts KP, Gostout CJ. Endoscopic circumferential esophageal mucosectomy in a porcine model: an assesment of a technical feasibility, safety and outcome. Endoscopy. 2001 Sep;33(9):791-4.
7. Neumann M, Mayer G, Ell C, Felzmann T, Reingruber B, Horbach T, et al. The Erlangen Endo-Trainer: life-like simulation for diagnostic and interventional endoscopic retrograde cholangiography. Endoscopy. 2000 Nov;32(11):906-10.
Correspondencia:
Asadur Jorge Tchekmedyian
Rambla República del Perú 1413 – Ap. 201. Montevideo 11300. Uruguay
E-mail: asadur@adinet.com.uy
Recibido: 29-04-2014
Aprobado: 18-09-2014

