











 texto en
texto en  Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink
INTRODUCCIÓN
El presente artículo representa un esfuerzo académico que pretende complementar criterios técnicos sobre la gestión de sistemas de semáforos que no están incluidos en los Manuales de Dispositivos de Control de Tránsito para Calles y Carreteras del Perú ni en sus homólogos de América Latina, en los cuales se basan importantes conceptos relacionados con la Ingeniería de Tránsito Urbano.
La operación de un sistema de control de tráfico debe reflejar fielmente las metas y objetivos de la política de una ciudad. La gestión de los semáforos es importante porque impactan directamente en la calidad del sistema de transporte, virtualmente a todos, todos los días. Los conductores perciben que la operación de la intersección semaforizada funciona si las luces se encienden en los colores rojo, amarillo y verde. Sin embargo, no son conscientes de que optimizar los tiempos de la intersección puede reducir indicadores como retrasos, paradas, consumo de combustible, emisiones a la atmósfera y siniestros viales (Federal Highway Administration [FHWA], 2020). Así, un semáforo que no proporcione tiempo suficiente para cruzar la calle, por ejemplo, puede crear una experiencia desagradable y desanimar por completo el desplazamiento a pie. Del mismo modo, los retrasos significativos pueden provocar que los usuarios ignoren el semáforo o corran demasiados riesgos al llegar a las intersecciones (National Association of City Transportation Officials [NACTO], 2013, p. 126).
Day et al. (2014) sostienen que, de acuerdo con la teoría económica aplicada al análisis de los sistemas de transporte, se espera que los cambios en el nivel de servicio de una infraestructura induzcan cambios en el nivel de demanda. Es sabido que la reprogramación de los sistemas de semáforos tiene beneficios directos para las operaciones en redes viales urbanas. Sin embargo, a menudo es difícil cuantificar estos beneficios en términos de reducciones de costos para el usuario y beneficios ambientales (Day et al., 2010). Por ejemplo, el proyecto de mejoras en los tiempos del semáforo de 60 intersecciones en el barrio de Back Bay, en Boston encontró mejoras en la relación costo-beneficio de 61:1 ($1,205,400 y $1,718,000 dólares americanos por año en implementación de las Fases 1 y 2 respectivamente) (Boston Transportation Department y Howard/Stein-Hudson Associates, Inc., 2010). En ese sentido, las mejoras en las operaciones del sistema de semáforos son un esfuerzo especial que forma parte de la gestión del tráfico, pero requiere un conjunto particular de especialización, experiencia y recursos. Los impactos de las operaciones de las intersecciones con semáforo a menudo se subestiman en la elaboración de presupuestos y niveles de personal en muchas agencias de transporte, incluso en Estados Unidos.
El recálculo y la actualización permanente de las fases y repartos de verdes de los semáforos es una actividad fundamental y permanente de la gestión del sistema de control de tráfico (National Operations Center of Excellence, 2019; National Cooperative Highway Research Program [NCHRP], 2010). Los algoritmos matemáticos que se encuentran incorporados en los modelos de optimización de tiempos de sistemas de análisis de tráfico urbano (en softwares diseñados específicamente para este fin) tienen la capacidad de recibir los datos proporcionados por los sensores de tráfico y adaptar los tiempos de los semáforos a las condiciones actuales. Además de garantizar una gestión más eficiente del desplazamiento del caudal del tráfico sobre la red, la aplicación correcta de la ingeniería en la semaforización activada también compromete el uso de menos recursos humanos1 y financieros para actualizar la base de datos de tráfico del sistema (Virginia Center for Transportation Innovation and Research, 2015).
El objetivo de esta investigación fue desarrollar una propuesta técnica basada en los conceptos internacionalmente aceptados y adoptados para la puesta en marcha de un sistema de gestión operacional de intersecciones semaforizadas en la ciudad de Lima, que ayude a aligerar la muy elevada congestión vehicular: 16/7 horas del día de una semana típica. Para ello, se partió de la hipótesis que plantea que la implementación del sistema propuesto contribuiría a descongestionar el tráfico vehicular hasta en un 30% durante todas las horas del año.
En 2016, se creó el Proyecto Especial para la Gestión de Tránsito en Lima Metropolitana - Protránsito, adscrito a la Gerencia Municipal de Lima Metropolitana, que administra y planifica integralmente la gestión del tránsito a través de la Red Semafórica Centralizada y todos sus componentes (Protránsito, s.f.). Exactamente el último día útil del año 2017, la Municipalidad Metropolitana de Lima (MML), suscribió un contrato por casi 120 millones de soles para el Proyecto de Adquisición e Implementación y Puesta en Marcha de los Proyectos de Semaforización de la Provincia de Lima - Licitación Pública N.º 015-2017-CS/MML. El estudio justifica su esencia con base en que el proyecto tiene más de cuatro años sin entregar ningún éxito probado en la reducción de tiempos de viaje para la ciudad de Lima. Finalmente, el estudio no presenta limitaciones en cuanto a que las opciones de evaluación y contrastación de la hipótesis son atendibles con los recursos de levantamiento de información y herramientas de simulación de tráfico vehicular con los que cuenta el autor.
Tipos de control semafórico
Según el Manual de Capacidad Vial de Estados Unidos (Transportation Research Board [TRB], 2022), utilizado como documento fuente en todo lo relacionado a la Ingeniería de Transporte y Tránsito en el Perú y América Latina, hoy en día se utilizan dos tipos de controladores de semáforos que se clasifican en controladores de tiempo fijo (pre-timed) y controladores actuados (actuated) según el tipo de control que brindan.
El controlador preprogramado o de tiempo fijo emplea una secuencia fija de fases o etapas de operación, que generan un orden repetitivo de la sesión del movimiento. La duración de cada fase es fija. La combinación entre secuencia de fase y tiempos fijos proporciona una longitud del ciclo constante en segundos.
El controlador actuado, activado o accionado suele tener una secuencia de fases o etapas de operación predefinidas, en la que el inicio y cierre de cada una de ellas depende de si la fase está en recuperación o si el movimiento de tráfico asociado ha presentado una llamada de servicio a través de un detector. El tiempo en verde está determinado por la información vehicular obtenida del detector, sujeta a límites mínimos y máximos preestablecidos. Para que una fase activa culmine, se requiere de una llamada de servicio de un movimiento vehicular en conflicto. La operación de una fase puede omitirse si no se detecta ninguna demanda de usuarios.
Consideraciones iniciales para determinar el tiempo del semáforo
La Tabla 1 resume la información básica que un profesional podría analizar como parte de los tres primeros pasos del proceso basado en resultados (TRB, 2015).
Tabla 1 Consideraciones iniciales de sincronización.2
| Proceso basado en resultados | Consideraciones iniciales del tiempo del semáforo | |
|---|---|---|
| PASO 1 Definir el ambiente operacional | Impactos multijurisdiccionales | ¿El sistema de semaforización está ubicado en múltiples jurisdicciones? |
| Si es así, ¿es el desempeño del sistema consistente a través de ellas? | ||
| ¿Existe algún acuerdo que defina ciertos parámetros para establecer un sistema consistente? | ||
| Clasificación vial | ¿Cómo está clasificada la red vial (calles principales y secundarias)? | |
| ¿Existen necesidades específicas para peatones, ciclistas, red de carga o rutas de transporte público? | ||
| Red de transporte | ¿Qué tan cerca se encuentran espaciadas las intersecciones? | |
| ¿Existe una razón para considerar un sistema de red? | ||
| ¿Está la calle secundaria coordinada? | ||
| ¿Existe cerca un tren (carga y/o pasajeros) que requiera preferencia? | ||
| PASO 2 Identificar a los usuarios | ¿Cuál es la combinación de usuarios existente (p. ej. peatones, bicicletas, vehículos ligeros, vehículos pesados incluyendo camiones y autobuses, vehículos de prioridad y trenes de carga y/o pasajeros)? | |
| ¿La combinación de usuarios cambia a lo largo del día? | ||
| PASO 3 Establecer prioridades de usuarios y movimientos | ¿Cuáles son los usuarios críticos en la(s) intersección (intersecciones)? | |
| ¿Cambia el usuario crítico durante el día? | ||
| ¿La jurisdicción tiene alguna política relacionada con prioridades de usuarios? | ||
| ¿Cuáles son los movimientos críticos? | ||
Fuente: Elaboración propia, adaptado del TRB (2015), NCHRP Report 812, Exhibit 3-5.
Detección
La Figura 1 ilustra el flujo de entradas y salidas hacia y desde las diversas piezas del equipo tecnológico en una intersección semaforizada individual. Hay tres categorías principales de equipos de semaforización en una intersección: (1) detección, (2) equipo de gabinete y (3) luces. Los sensores detectan a los usuarios y comunican al equipo computacional del gabinete su presencia en una intersección. El equipo del gabinete (el controlador en particular) interpreta las entradas de los sensores y las traduce en salidas en función del plan de tiempos. Luego, la información de salida se envía a las luces para que los usuarios puedan circular por la intersección (TRB, 2015).
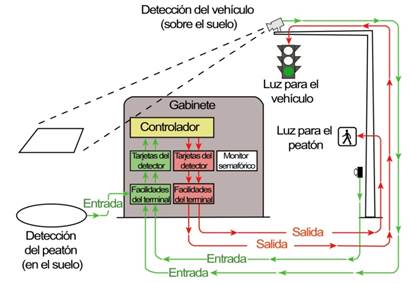
Fuente: Elaboración propia, adaptado del TRB (2015), NCHRP Report 812, Exhibit 4-1.
Figura 1 Flujo de entradas y salidas de sensores, equipo de control y luces.
Las zonas de detección pueden variar en función de la ubicación, el tipo de tecnología de detección utilizada y la velocidad de aproximación. La Figura 2 ilustra un enfoque básico para la ubicación de la zona de detección en la intersección de una calle principal de alta velocidad (se muestra a la izquierda/derecha) y una calle secundaria de baja velocidad (se muestra arriba/abajo) (TRB, 2015).
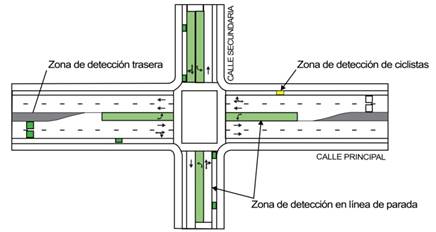
Fuente: Elaboración propia, adaptado del TRB (2015), NCHRP Report 812, Exhibit 4-4.
Figura 2 Diseño básico de detección.
La Tabla 2 resume los objetivos principales para diferentes tipos de detección.
Tabla 2 Objetivos de la detección.
| Tipo de detección | Objetivo(s) principal(es) |
|---|---|
| Detección de vehículos en aproximaciones de alta velocidad | Servir a la cola al inicio del verde |
| Terminación segura de la fase cuando existe un llamado en conflicto | |
| Detección de vehículos en aproximaciones de baja velocidad | Llamar a fases en aproximaciones de baja velocidad |
| Servir a la cola al inicio del verde | |
| Minimizar la demora reduciendo los llamados a movimientos permitidos | |
| Detección de vehículos en el carril de volteo a la izquierda | Llamar a fases de volteo a la izquierda |
| Servir a la cola al inicio del verde | |
| Minimizar la demora reduciendo transiciones ineficientes | |
| Prevenir a vehículos que se quedan atorados en medio de la intersección | |
| Detección de vehículos en el carril de volteo a la derecha | Minimizar demoras reduciendo llamados por vehículos que voltean a la derecha en rojo |
| Llamar a fases de volteo a la derecha (si se usan) | |
| Detección peatonal | Llamado de fases peatonales |
| Detección de ciclistas | Llamado de fases independientes a carriles motorizados o carriles bici |
| Prevenir atropellamientos a ciclistas si se usan fases independientes | |
| Eliminar la necesidad para ciclistas de usar fases para peatones | |
| Detección de vehículos de emergencia | Permitir las opciones de tratamiento preferencial para vehículos de emergencia |
| Detección de autobuses | Permitir las opciones de tratamiento preferencial para vehículos de transporte público |
| Detección de trenes | Garantizar la seguridad y eficiencia de la secuencia semafórica antes, durante y después del paso de trenes. |
Fuente: Elaboración propia, adaptado de TRB (2015), NCHRP Report 812, Exhibit 4-5.
Generalidades sobre fases
Las fases (Φ s ) representan el método fundamental por el que una señal del semáforo acomoda a los diversos usuarios en una intersección de manera segura y eficiente. A lo largo de los años, la descripción de los movimientos individuales en el controlador con una configuración de barreras y anillos, con 8 movimientos como fases o etapas se ha convertido en una terminología común conocida como número del movimiento, sinónimo de número de fase. Esto es un error. La mayoría de los diseños de tiempos y todos los controladores vendidos en la actualidad proporcionan ocho fases estándar dentro del controlador. Sin embargo, en la literatura se hace referencia comúnmente a una intersección de cuatro fases para representar una intersección de cuatro accesos estándar con giros a la izquierda permitidos en todos los accesos. Una fase se define como una unidad de tiempo del controlador asociada con el control de uno o más movimientos simultáneos (FHWA, 2008, p. 93).
Dos términos adicionales importantes para mejorar el uso de la terminología relacionada son movimiento e intervalo. Un movimiento refleja la perspectiva del usuario y se define por el tipo de usuario y la acción que se realiza (movimiento de giro para un vehículo o cruce de peatones). Un ejemplo sencillo del concepto de movimientos es la intersección de calles de un solo sentido que se muestra en la Figura 3. En este ejemplo, la intersección es operada por dos fases (2 y 4) y los peatones se acomodan como movimientos concurrentes al tráfico. La fase 2 incluirá un movimiento de paso y otro de giro a la derecha, mientras que la fase 4 tendrá un movimiento de paso y un giro a la izquierda (los movimientos de giro apropiados se omiten en el diagrama). El giro a la derecha en la fase 2 debe ceder el paso a los peatones que cruzan el tramo oeste de la intersección. Un intervalo es una duración de tiempo durante el cual las indicaciones de la señal del semáforo no cambian. Por ejemplo, una fase de peatones contiene tres intervalos: Caminar, Intermitente «no caminar» y No caminar; dentro de los intervalos Caminar e Intermitente «no caminar», el movimiento de paso correspondiente permanecerá en verde (FHWA, 2008, p. 93).
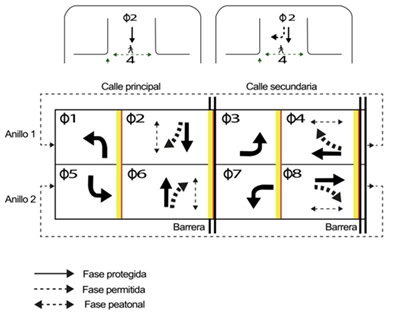
Fuente: Elaboración propia, adaptado de FHWA (2008), Figuras 4-2 y 4-4.
Figura 3 Diagrama de fases, movimientos y barrera-anillo estándar, para una intersección de dos calles de un solo sentido.
Coordinación de redes de semáforos
La coordinación, o denominada más apropiadamente progresión, se refiere al momento en el que las señales del semáforo permiten que un pelotón de automóviles (u otros usuarios de la red, también existe progresión para ciclovías, por ejemplo) que circula por una calle llegue a una sucesión de semáforos en verde y avance a través de múltiples intersecciones sin detenerse. Un sistema de señales semafóricas bien coordinado puede mejorar el flujo de tráfico, reducir las demoras y minimizar la contaminación. Las calles arteriales y redes del centro de la ciudad son ejemplos de ello. Diversos factores influyen la decisión de utilizar la coordinación de redes de semáforos, pero lo más importante que debe tener en cuenta un profesional es el entorno operativo, los usuarios y las prioridades apropiadas de estos.
La coordinación debe ser utilizada para cumplir objetivos específicos, pues no es apropiada en todas las situaciones. Si bien la coordinación puede reducir el tiempo de viaje, las paradas, las demoras y las colas para los movimientos coordinados, lo que reduce el consumo de combustible y mejora la calidad del aire, puede haber consecuencias para los movimientos no coordinados (FHWA, 2008).
Se pueden usar procedimientos simples y complejos para identificar qué intersecciones coordinar (FHWA, 2005). En general, cuando las intersecciones están próximas entre sí (es decir, a unos 800 metros), resulta ventajoso coordinarlas, especialmente si los volúmenes entre las intersecciones son significativos. A distancias mayores (es decir, a más de 800 metros), los volúmenes de tráfico y el potencial para los pelotones se deben revisar más para determinar si la coordinación beneficiaría a las operaciones del sistema.
La Figura 4 ilustra el concepto de vehículos en movimiento a través de un sistema de semáforos, utilizando una representación gráfica conocida como un diagrama de tiempo-espacio. En este gráfico se trazan las trayectorias ideales del vehículo a través de una serie de intersecciones semaforizadas. Las ubicaciones de las intersecciones se muestran en el eje de la distancia y los vehículos viajan en ambas direcciones en una vía de doble sentido. La secuencia de tiempo del semáforo y los repartos para cada intersección semaforizada se trazan a lo largo del eje del tiempo. El eje del tiempo ilustra lo que experimentarán los motoristas en la arteria mientras viajan por ella. Los giros a la izquierda se muestran como líneas en ángulo que operan con un verde concurrente en la misma dirección o no (TRB, 2015).
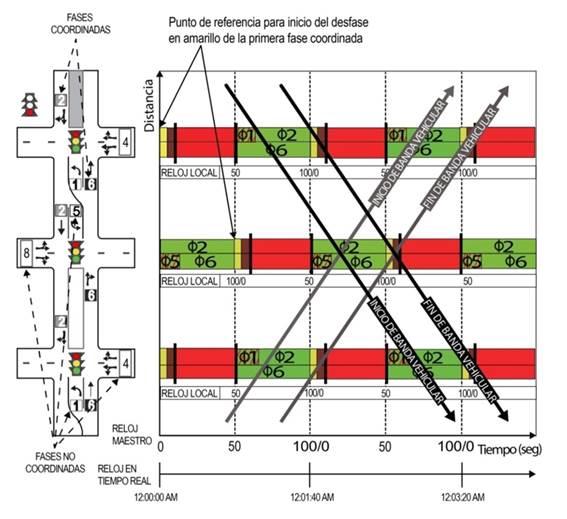
Fuente: Elaboración propia, adaptado de TRB (2015), NCHRP Report 812, Exhibit 7-1.
Figura 4 Diagrama tiempo-espacio de un plan coordinado.
METODOLOGÍA
La perspectiva del proyecto consiste en la base teórica y el modelado de simulación, que incluye la propuesta de ubicación de sensores para las estrategias de control semafórico de campo. Se puso especial énfasis en la respuesta que el control adaptativo generó sobre la longitud de la cola de la situación actual de la semaforización de tiempo fijo, es decir, sin la implementación de dicho control. Los beneficios se miden evaluando y comparando 1) el sistema de operación semafórica de tiempo fijo con planes de control existente y 2) el sistema de control adaptativo con nueva tecnología de hardware y software para optimización de los planes existentes. La Figura 5 ilustra la metodología propuesta.
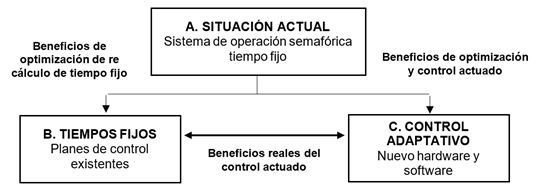
La comparación de B versus C proporciona los verdaderos beneficios del control adaptativo del Centro de Gestión de Tráfico (TMC, por sus siglas en inglés).
Fuente: Elaboración propia, adaptado de Skabardonis (1996).
Figura 5 Medición de los beneficios del control operacional adaptativo en intersecciones con semáforo.
Modelado de simulación
Existen una amplia gama de herramientas computacionales disponibles para modelar condiciones operacionales de sistemas semafóricos. Sin embargo, solo muy pocas permiten evaluar la reacción a los datos proporcionados por los sensores de control de sistemas adaptativos. En ese sentido, se seleccionó Aimsun Next como el software para simular las estrategias de control, dado que posibilita la visualización de las mejoras en el plan de control de tiempos y la evaluación del desempeño de control adaptativo.
Calibrando las condiciones de línea base
Calibrar un modelo de simulación de tráfico es un paso fundamental para asegurar que dicha herramienta refleje el comportamiento real del área de estudio. En ese sentido, es necesario recopilar información fidedigna de la red vial, los patrones de tráfico y los algoritmos de tráfico multimodal.
En lo que respecta a la red vial, es necesario recopilar información sobre la geometría idéntica a la vialidad en estudio (perfiles, alturas, radios, movimientos de giro y secciones) y gráficos de control de la velocidad multimodal, movimientos de giro y semáforos (fases, tiempos, desfases).
En lo que respecta a los patrones de tráfico, es necesario recopilar información sobre el flujo de entrada al modelo del área de estudio y porcentajes de movimientos los cruces, la elección de modelos de asignación de tráfico dinámico (si es que el software lo permite) para modelar el recorrido y la calibración y reparto del tráfico para balanceo y equilibrio de la red vial.
En lo que respecta a los algoritmos de tráfico multimodal, es necesario recopilar información sobre los modos, cambios de carril, aceptación de brechas, etc., si es que el software permite calibrar estos comportamientos (p. ej. conductor agresivo, relajado, situación de lluvia, etc.).
Estadístico de calibración GEH
El estadístico GEH (Ec. 01) se utiliza en Ingeniería de Tráfico para comparar dos conjuntos de datos de tráfico. Beeston et al. (2021) sostienen que es una fórmula empírica que ha demostrado ser bastante definida. Fue denominada en honor a Geoffrey E. Havers, quien la determinó en la década de 1970 cuando trabajaba como planificador de transporte en Londres, Inglaterra. Para la validación del modelo de simulación, se realizó una comparación entre el flujo vehicular de entrada medido en campo y el flujo vehicular de entrada del modelo. Ambos son consistentes con los parámetros descritos en la Tabla 3.
 Ec. 01
Ec. 01
Donde:
GEH = Indicador estadístico; E = Volumen estimado del modelo; y V = Volumen medido en campo
Tabla 3 Descripción de los parámetros del indicador estadístico GEH.
| GEH | Indicador estadístico |
|---|---|
| < 5.0 | Variación aceptable |
| 5.0 - 10.0 | Se justifica la investigación |
| 10.0 a más | Existe una alta probabilidad de un problema con el modelo |
Fuente: Elaboración propia, adaptado de Beeston et al. (2021), Tabla 12. Ecuación de Geoffrey E. Havers, 1970.
Elección del área de estudio
La elección del tramo la Av. Petit Thouars (entre la Av. Alejandro Tirado y la Av. 28 de Julio) se justifica porque en esa vía se desarrolló un proyecto de coordinación de semáforos en el año 2010 a cargo de la MML, el cual no consideró la calibración de los flujos de las calles transversales. Además, no fue desarrollado con base en un modelo de simulación como el propuesto, ni tampoco cuenta con una actualización de los tiempos conforme al aumento de la tasa de motorización propia de cualquier ciudad capital (es del orden de 2.5% anual para Lima). Todas estas consideraciones otorgan relevancia al estudio de esta propuesta. En ese sentido, se modelaron cinco (05) cruces controlados con semáforos y dos (02) cruces viales de prioridad o sin semáforo (ver Figura 6 y Tabla 4).

Tabla 4 Cruces de la red vial analizados.
| Cruce: Av. Petit Thouars con | Tipo de control |
|---|---|
| Av. 28 de Julio | Semáforo |
| Jr. Hernán Velarde | Señal de PARE |
| Jr. Manuel Corpancho | Semáforo |
| Jr. Saco Oliveros | Semáforo |
| Jr. Madre de Dios | Señal de PARE |
| Jr. Emilio Fernández | Semáforo |
| Av. Alejandro Tirado | Semáforo |
Fuente: Elaboración propia.
Propuesta de escenarios de análisis para la modelación
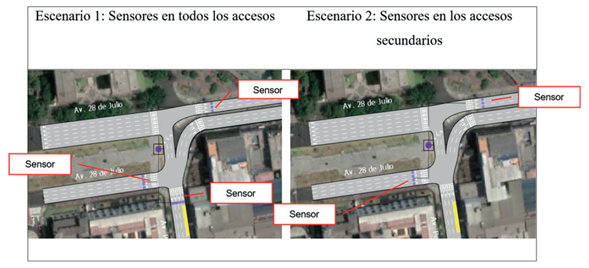
Actualmente, los cruces evaluados cuentan con semáforos de tiempo fijo, excepto los dos que tienen señal de PARE. La primera propuesta contempla colocar sensores en todos los accesos de los cinco cruces semaforizados evaluados. Cada sensor de detección registra y transmite la cantidad de vehículos que circulan en un período de tiempo. El siguiente escenario contempla colocar sensores para el control solo en las calles transversales o secundarias a la Av. Petit Thouars, con el fin de mantener la coordinación semafórica actual de los movimientos directos de dicha avenida. En la Figura 7 se muestra un ejemplo de la ubicación de los sensores para ambos escenarios, que se repiten para toda la red.
RESULTADOS
Validación del modelo
Los resultados mostrados en la Tabla 5 respaldan la validez de los modelos de simulación de tránsito en todos los escenarios, dado que los indicadores GEH son menores que 5 (ver Tabla 3) en todos los accesos analizados.
Tabla 5 Resultados de calibración del estadístico GEH del modelo en Aimsun Next.
| APROXIMACIÓN | Situación actual | Escenario 1 | Escenario 2 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Flujo de entrada (veh/hr) | GEH | Flujo de entrada (veh/hr) | GEH | Flujo de entrada (veh/hr) | GEH | ||||
| Simulado | Real | Simulado | Real | Simulado | Real | ||||
| Av. 28 de Julio (O) | 1223 | 1135 | 2.55 | 1200 | 1136 | 1.87 | 1152 | 1136 | 0.47 |
| Av. 28 de Julio (E) | 1457 | 1357 | 2.60 | 1444 | 1358 | 2.30 | 1328 | 1358 | 0.82 |
| Jr. Hernán Valverde (O) | 16 | 16 | 0.00 | 16 | 16 | 0.00 | 12 | 16 | 1.07 |
| Jr. Hernán Valverde (E) | 52.1 | 53.1 | 0.14 | 52 | 53 | 0.14 | 52 | 53 | 0.14 |
| Jr. Manuel Corpancho | 522 | 538 | 0.74 | 564 | 537 | 1.15 | 504 | 537 | 1.45 |
| Jr. Saco Oliveros (O) | 425 | 374 | 2.54 | 420 | 373 | 2.36 | 396 | 373 | 1.17 |
| Jr. Saco Oliveros (E) | 261 | 314 | 3.14 | 268 | 313 | 2.64 | 276 | 313 | 2.16 |
| Jr. Madre de Dios (O) | 285 | 220 | 4.09 | 284 | 219 | 4.10 | 256 | 219 | 2.40 |
| Jr. Madre de Dios (E) | 190 | 184 | 0.45 | 188 | 182 | 0.44 | 196 | 182 | 1.02 |
| Jr. Emilio Fernández (O) | 209 | 230 | 1.56 | 200 | 231 | 2.11 | 248 | 231 | 1.10 |
| Jr. Emilio Fernández (E) | 205 | 220 | 1.04 | 204 | 219 | 1.03 | 260 | 219 | 2.65 |
| Av. Alejandro Tirado (O) | 417 | 385 | 1.58 | 412 | 384 | 1.40 | 408 | 384 | 1.21 |
| Av. Alejandro Tirado (E) | 445 | 396 | 2.22 | 428 | 398 | 1.48 | 380 | 398 | 0.91 |
| Av. Petit Thouars | 1195 | 1207 | 0.33 | 1216 | 1208 | 0.23 | 1252 | 1208 | 1.25 |
| GEH Promedio | 1.64 | 1.52 | 1.27 | ||||||
Fuente: Elaboración propia con base en los resultados del modelo de simulación Aimsun Next.
Comparación de escenarios
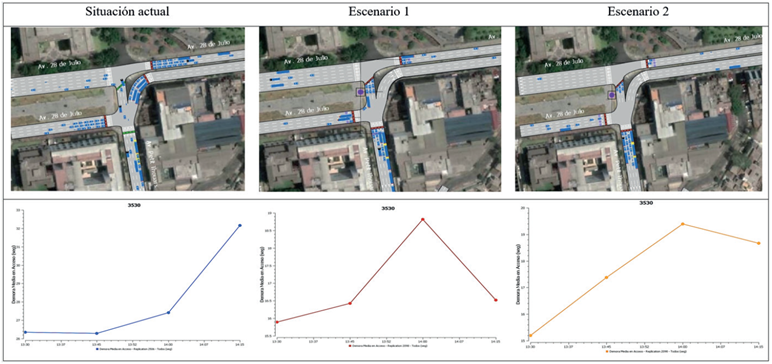
Para continuar con el mismo ejemplo donde se toma la intersección de las avenidas Petit Thouars y 28 de Julio, en la Figura 8 se muestran las variaciones de los retrasos (segundos), para periodos de 15 minutos evaluados en el modelado, comparando cada uno de los escenarios con la situación actual.
Fuente: Elaboración propia con base en los resultados del modelo de simulación Aimsun Next.
Figura 8 Comparación de la demora media vehicular (segundos) en el cruce de las avenidas Petit Thouars y 28 de Julio.
De manera similar, en la Tabla 6, se muestran los resultados de las medidas de eficacia típicas para el análisis de congestión vehicular (MOE, por sus siglas en inglés), tanto para la situación actual como para los dos escenarios propuestos.
Tabla 6 Resultados operacionales de la red vial modelada por escenarios en las medidas de eficacia (MOE).
| MOE | Situación actual | Escenario 1 | Escenario 2 | |||
|---|---|---|---|---|---|---|
| Valor | σ* | Valor | σ* | Valor | σ* | |
| Largo de cola promedio (veh) | 74.00 | SC** | 43.00 | SC** | 52.00 | SC** |
| Detenciones (veh/km) | 0.10 | SC** | 0.10 | SC** | 0.10 | SC** |
| Demoras (s/km) | 99.00 | 95.00 | 64.00 | 60.00 | 66.00 | 51.00 |
| Tiempo de viaje (s/km) | 165.00 | 95.00 | 130.00 | 58.00 | 133.00 | 52.00 |
| Velocidad (km/h) | 29.00 | 16.00 | 32.00 | 12.00 | 31.00 | 12.00 |
* Desviación estándar
** Sin cálculo
Fuente: Elaboración propia con base en los resultados del modelo de simulación Aimsun Next.
En la Tabla 7, se muestra la diferencia entre los resultados de los indicadores MOE obtenidos en el modelo. Se observan beneficios en ambos escenarios, con un aumento de la velocidad del escenario 1 versus el escenario 2, debido a la progresión del pelotón del flujo vehicular en la vía principal de la Av. Petit Thouars.
Tabla 7 Diferencia del MOE entre escenarios modelados.
| MOE | Situación actual vs. Escenario 1 | Situación actual vs. Escenario 2 |
|---|---|---|
| Largo de cola promedio (veh) | −31.00 | −22.00 |
| Detenciones (veh/km) | 0.00 | 0.00 |
| Demoras (s/km) | −33.00 | −31.00 |
| Tiempo de viaje (s/km) | −35.00 | −32.00 |
| Velocidad (km/h) | 3.00 | 2.00 |
Fuente: Elaboración propia con base en los resultados del modelo de simulación Aimsun Next.
DISCUSIÓN
El modelo arroja mejores resultados globales en los indicadores MOE del escenario 1, en donde se observa: disminución de colas medias (aproximadamente 31 vehículos en la red), número de paradas totales del vehículo (cero), disminución de demoras en la red vial (aprox. 34 s/km/veh en la red), disminución de tiempos de viaje (aprox. 35 s/km/veh en la red), aumento de más de 2 km/h por cada vehículo que circula en la red. Sin embargo, se pierde la coordinación semafórica implementada sobre la vía principal de la Av. Petit Thouars que solo favorece a los motoristas que circulan sobre esta vía. Esto genera actualmente más demoras (segundos) y colas (vehículos) en las vías secundarias, especialmente en horas de máxima demanda.
Con los resultados expuestos anteriormente, se sugiere desarrollar una propuesta de coordinación semafórica diferente a la actual, que abarque un área amplia en red de cruces, grilla o malla y no en eje, como lo es actualmente la Av. Petit Thouars, que equilibre los beneficios a los usuarios de las calles secundarias.
Los resultados numéricos de la modelación corresponden a los encontrados en una hora de simulación, en la hora más congestionada del día. En ese sentido, los beneficios y el desempeño sobre toda la red de la ciudad podrían ser fácilmente identificados utilizando la metodología para realizar una evaluación económica sobre la inversión de la implementación de un sistema como el propuesto, cuyos beneficios para la sociedad podrían ser muy elevados, incluso superiores a los observados en ciudades norteamericanas, que superan los US$ 40:1 de inversión (FHWA, 2005).
CONCLUSIONES
El diseño de los tiempos y el reparto de fases de los semáforos en una intersección son parámetros clave en la implementación de proyectos de control semafórico, que deben ser realizados por profesionales altamente calificados en sistemas de control semafórico de tránsito urbano. Este tema ha sido ampliamente descuidado en los Términos de Referencia (TdR) de proyectos de semaforización urbana en las municipalidades del país, principalmente por la falta de capacitación de los ingenieros encargados de promover estos proyectos desde el Estado. Dicho de otra manera, los proyectos de semaforización urbana no consisten simplemente en la adquisición de equipos y en la ejecución de obras civiles en una intersección y no deben ser desarrollados como tales.
Las estrategias de control actuado o adaptativo deben contener un modelado de línea de base calibrado a la situación actual, que permita analizar con precisión y un alto nivel de detalle la disposición del flujo de tráfico que discurre a través de un eje vial y su relación con las condiciones del sistema semafórico: tiempo de ciclo, repartos de verde (splits) y los desfases de coordinación con las intersecciones cercanas (offsets). Los cambios de tiempo derivados del control adaptativo se implementan en función de la variabilidad del tráfico dinámico en el área de estudio.
Pretender predecir el comportamiento de la movilidad urbana es siempre complicado, especialmente cuando se propone implementar sistemas y servicios intensivos en tecnología, como las telecomunicaciones aplicadas a sistemas de control operacional del tráfico urbano. Sin embargo, una serie de nuevas tecnologías están siendo probadas continuamente en este campo por los Departamentos de Transporte de países que cuentan desde hace años con sistemas de tecnología de punta en semaforización, como comunicaciones inalámbricas de banda ancha y sistemas de identificación por radiofrecuencia (RFID), tanto para usuarios con movilidad normal como para personas con movilidad reducida, estos últimos son los más vulnerables al intentar atravesar intersecciones con semáforo.

