










 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
Permalink
INTRODUCCIÓN
El objetivo del estudio fue evaluar si, en el espacio tridimensional del laberinto helicoidal ascendente (LHA), los ratones discriminarían entre la dirección horaria/antihoraria y sus componentes, la rotación izquierda-derecha en uno y derecha-izquierda en el otro como una conducta indicadora de criterio (CIC) de los mapas espaciales del GPS interno.
Se parte de la investigación en psicología animal (comparada), tributaria de los actuales enfoques neurocientíficos. En ellos, estudiosos de la psicología del aprendizaje como Britt y Moser juntamente con el neurofisiólogo O’Keefe (premio Nobel en Medicina y Fisiología 2014 por sus contribuciones a la explicación de la conducta espacial) sostuvieron la necesidad de emprender estas líneas de trabajo como parte de la investigación básica sobre la conducta en psicología cognitiva. Hoy en día, junto con las neurociencias, la psicología cognitiva cuenta con conocimientos que subyacen a la conducta aprendida.
La teoría hipocampal de los mapas espaciales (GPS) sostiene lo siguiente: “Las células de dirección de la cabeza no se limitan a orientar al animal en un plano horizontal, sino que también mantienen la orientación preferente cuando el animal trepa o desciende verticalmente” (Taube, 1998 en Kolb y Whishaw, 2006, p. 563). Se colige que esas células funcionan predominantemente en el espacio alocéntrico y no en el egocéntrico. En los humanos, el desarrollo de la región parietal, desarrollo escaso en las ratas por naturaleza, es imprescindible para la discriminación egocéntrica izquierda-derecha y viceversa y la percepción de rotaciones en el espacio.
Kolb y Wishaw (2006) sugirieron dos sistemas de navegación espacial en concordancia con la posibilidad de que existan dos sistemas para la conducta espacial:
El primero de estos sistemas podría basarse en señales egocéntricas, o señales procedentes de los propios movimientos corporales, y el segundo en señales alocéntricas, es decir, originadas en el medio circundante (…) En consecuencia, es posible que las células de ubicación y las células de dirección de la cabeza estén estrechamente ligadas a los movimientos oculares en los primates y a los movimientos corporales en las ratas (p. 564).
Actualmente, confirmada la hipótesis hipocampal, es de suponer que en los primates como en los humanos dichos movimientos oculares estén relacionados con los movimientos giratorios sobre su eje sagital, lo que no sería el caso de las ratas, puesto que ellas giran en su eje medial.
Las tareas utilizadas para medir las estrategias de navegación de las ratas se realizaron sobre el espacio plano con señales visuales del medio (Laberinto Radial de Olton, Laberinto en T, Caja de Grice y Prueba Acuática de Morris). (Kolb y Wishaw, 2006, pp. 557-558). En los LHA, los tubos helicoidales son oscuros desde la entrada a la plataforma de meta, lo que restringe las señales visuales durante el recorrido y serían las señales táctil-kinestésicas las predominantes en la formación de los mapas cognitivos del espacio.
La pregunta de investigación fue si el animal, mediante la técnica del condicionamiento instrumental discriminativo, lograría establecer un mapa de orientación, integrando dos laberintos helicoidales ascendentes (LHA) con dirección horaria y antihoraria de manera similar a como se forman los mapas cognitivos según la teoría hipocampal que, en su primer componente, sostiene lo siguiente: “Los animales se desplazan a través de su ambiente y crean una representación cerebral de este en la forma de un mapa denominado mapa cognitivo que se utiliza para dirigir nuevos movimientos a través de ese mismo entorno” (Kolb y Wishaw, 2006, p. 555).
O’Keefe y los esposos Moser encontraron las bases neurofisiológicas del comportamiento de orientación espacial en el hipocampo, como en la corteza entorrinal y otras regiones del mismo. Los mecanismos de navegación requieren la información sobre la ubicación y el rumbo direccional, ambos necesarios para el desplazamiento adecuado (Comunicado de prensa, 2014).
Según O’Keefe y Dostrovsky en 1971, las células de lugar o de posicionamiento son las que codifican información sobre la ubicación del animal, mientras que las que codifican información sobre el rumbo direccional en el plano horizontal del animal se denominan células de dirección de la cabeza o HD (siglas del inglés Head Direction). Estas se activan cuando el animal se encuentra en una dirección particular del espacio alocéntrico; recibe información multimodal que, a su vez, recibe e integra la información sensorial y motora de varias fuentes y también cuando la cabeza apunta a un punto específico del entorno (Caballero, 2015, pp. 10, 17-18).
Según hallazgos reportados por Hill en 1978, McNaughton y Wilson en 1993, Frank et al. en 2004, Kentros et al. en 2014 y Mónaco et al. en 2014 (en Moser, Rowland y Moser, 2015, p. 4), hay una determinación de los mapas por las células de lugar y un papel crítico de la experiencia en la formación del mapa hipocampal en el espacio. Si bien las células de lugar están predeterminadas por la experiencia previa cuando la rata está en un lugar novedoso, requieren algunos minutos de exploración antes de establecerse en un campo específico (características espaciales particulares), mostrándose así que el mapa evoluciona con la experiencia, modificándose los mapas preexistentes, adaptándose a los detalles del entorno a través de la plasticidad dependiente de la experiencia.
Debemos señalar que los descubridores del GPS no utilizaron o recurrieron a las técnicas de condicionamiento alguno. En este sentido, sus procedimientos fueron semejantes a los que utilizaron Edward C. Tolman en 1932 y sus discípulos Uster, Olton y Samuelson en 1976 (en Bower y Hilgard, 2004). En diferentes épocas, estos investigadores observaron la conducta exploratoria de las ratas en espacios delimitados.
Aunque Tolman y sus discípulos no se ocuparon de la progresión direccional de los movimientos de las ratas, cabe señalar que, en la neurociencia, los estudios sobre asimetría cerebral reportan que la mayor parte de las asimetrías posturales en los roedores son aleatorias en la población. En su hemisferio derecho cuya corteza visual y parietal son más grandes y gruesas, la corteza parietal estaría implicada en el control de la conducta emocional y espacial, lo cual sería hipotético (Kolb y Wishaw, 2006, p. 310).
En cambio, en los monos y el hombre la idea general del papel que cumple la región parietal posterior en la guía de los movimientos y la detección de los estímulos en el espacio ha sido confirmada por estudios electrofisiológicos y clínicos (Kolb y Wishaw, 2006, pp. 350-351). Es evidente que el desplazamiento en el espacio alocéntrico de monos y hombres (bípedos) difiere enormemente del de las cuadrúpedas ratas; estas características posturales pueden constituir un factor en el modo de percibir dicho espacio cuando de desplazarse en él se trata.
Según la teoría de la recurrencia y los sentidos superiores de C. Sherrington en 1906 (en Thines, 1966, pp. 88-92), entendemos que los sentidos primitivos de orientación son los vestíbulo-propioceptores. Estos son necesarios para el equilibrio en el desplazamiento activo y sus señales en los roedores provienen de la coordinación propioceptiva cuadrúpeda con el vestíbulo en la cabeza y su integración en la corteza cerebral ‒región parietal, principalmente‒ en el espacio alocéntrico plano. En este plano, los parámetros del GPS juegan un rol preponderante.
Para responder a la pregunta planteada se propuso un diseño en el espacio tridimensional de un LHA donde los ratones fueron observados bajo un condicionamiento instrumental de discriminación de un laberinto con dirección horaria y otro con dirección antihoraria, uno con reforzamiento y el otro no, correspondiendo cada laberinto a un mapa de rotación diferente: a) derecha-izquierda y b) izquierda-derecha. Sin embargo, ambos estaban integrados en un solo mapa de darse la discriminación. Por lo cual, para precisar la respuesta discriminativa, reportada en su expresión general y ponderada por la respuesta molar del tiempo en ella (RAIS, 2021), en este informe se amplía dicha ponderación en su expresión específica por la respuesta no molar del tiempo con el respectivo análisis adicional incluido en los resultados.
Conceptualmente, la modalidad de aprendizaje instrumental, en el marco de la teoría del aprendizaje por reforzamiento (Hull, 1943 en Osgood, 1969, p. 496), establece una función R-E (respuesta-estímulo) por oposición a la modalidad clásica de relación E-E siendo R el instrumento para producir el reforzamiento, por lo que el sujeto debe estar motivado para que ocurran respuestas variadas, entre las cuales algunas se convierten en selectivas al estímulo adecuado al estado motivacional (Osgood, 1969, p. 402). Así, en un laberinto, un organismo llega a construir una secuencia de respuestas motoras (encadenamiento) que lo inducen al estímulo indiciario de meta (Rm). Cada elemento de la cadena en el proceso de aprendizaje se convierte en relación E-R anticipatoria de meta. Todo esto da lugar a un hábito susceptible de extinguirse si no se refuerza la Rm y el organismo regresa a conductas de exploración (Osgood, 1969, p. 493). Por lo tanto, en la discriminación instrumental están implicados los efectos diferenciales de los encadenamientos que conducen a una Rm reforzada o no, por lo cual una ruta no reforzada se puede convertir en un estímulo indiciario de otra ruta reforzada, siempre que los estímulos se presenten simultáneamente.
La validez experimental del instrumento de observación utilizado se sostiene básicamente por el hecho del encadenamiento instrumental logrado, donde se da por supuesto la implicación de un mapa espacial. Más bien, los mapas espaciales adoptan formas de encadenamientos instrumentales; entonces el aprendizaje de discriminación implica dos o más sub-encadenamientos en un solo mapa espacial (similar al encadenamiento de distancias cortas).
Operacionalmente, el aprendizaje instrumental consiste en la formación de un hábito sensomotor en relaciones entre estímulos y respuestas de movimiento, donde las respuestas constituyen el medio instrumental y los estímulos la finalidad. Entonces, se dice que se ha formado una conducta o hábito en el que la respuesta es selectiva ante determinado estímulo, que puede tener carácter reforzante. Una conducta instrumental es discriminativa cuando el organismo emite respuestas diferenciales ante dos o más estímulos que, potencial o manifiestamente, son reforzantes. Por el diseño, el tipo de discriminación sería de carácter sucesivo en un laberinto con reforzamiento (A) y sin reforzamiento (B). Sin embargo, dada la condición de elección libre de uno de ellos o de los dos (A y/o B), la probabilidad en el transcurso de los ensayos de que la ubicación de los LHA haya producido una discriminación simultánea no se descarta (González, 1971, pp. 93-94).
Tampoco se descarta el aprendizaje instrumental incidental en el LHA, el que se da sin motivación (Osgood, 1969, pp. 550-551) como sería el aprendizaje en el laberinto sin reforzamiento en contraste con el del laberinto con reforzamiento. Son igualmente válidos, pero no indicadores de un efecto diferencial discriminante de la condición experimental.
Con el propósito de evaluar la conducta de los ratones albinos en el LHA, se plantearon objetivos específicos de acuerdo con las leyes del aprendizaje determinando sus modalidades en condiciones de aprendizaje discriminativo, así como el nivel del efecto producido en el espacio tridimensional del instrumento. Como a todo laberinto de aprendizaje y memoria espacial, subyace la construcción de mapas o GPS interno, siendo este el propósito del objetivo general.
MÉTODO
Tipo de investigación
Es experimental porque se manipula las condiciones de la variable independiente, creando situaciones experimentales ante las cuales se predice que los sujetos respondan de una manera esperada por el experimentador en función de la hipótesis del estudio y su diseño (Alarcón, 2013; Fraisse, 1972; González, 1971). El estudio tiene dos fases (I y II). La primera corresponde a la ciencia de la observación (Bernard, 1944, p. 295) en la cual se verifica la adaptación de los sujetos experimentales (ratones) al LHA. La segunda corresponde al experimento psicológico propiamente dicho, es decir, al de una experiencia provocada a diferencia de la primera fase donde la experiencia es invocada (Bernard, 1952 en Fraisse, 1972, pp. 116-117). Estratégicamente, la fase I es precondición de la fase II, ya que la adaptación en I es una línea base de control experimental en II, concerniente a las asimetrías posturales de los ratones, pues en los roedores la mayoría de ellas son aleatorias (Kolb y Wishaw, 2006, p. 310).
Diseño de investigación
El diseño experimental es univariable y bimodal o bivalente porque manipula una variable independiente (variable de estímulo -E-) con dos niveles o grados, donde el espacio tridimensional del LHA produce en los ratones conductas de aprendizaje discriminativo (variable de respuesta -R-), infiriéndose de las unidades de conducta identificadas los mapas espaciales (variable del organismo -O-), proceso interno mediador activado por la variable condicionante (provocado en el experimento controlado) bajo el paradigma más completo, de fórmula E-O-R (Alarcón, 2013, p. 81-83), mismo modelo metodológico de la psicología del aprendizaje (González, 1971) y en la hipótesis teórica de la mediación representacional entre los procesos cognoscitivos y los ejecutivos en el aprendizaje (Osgood, 1969, pp. 481-548). Este diseño es experimental simple porque compara dos grados de la variable independiente que, en una diferencia cualitativa, el caso límite es la ausencia o presencia de la variable (Fraisse, 1972, p. 130-131).
Muestra
Conformada por cuatro ratones albinos, machos de 3 a 4 meses de edad y alimentados con ratonina, fueron identificados por un número para el registro protocolar y un color (recurso visual para el experimentador): 1 (azul), 2 (verde), 3 (blanco) y 4 (rojo). Tanto en la fase I como en la II, fueron los mismos sujetos experimentales participantes en los diferentes momentos del entrenamiento de aprendizaje en el LHA (diseño de un solo grupo): dos subfases en I (de preentrenamiento y otro de entrenamiento básico) y en II (de entrenamiento más avanzado).
Por las condiciones del experimento (entre ellas, el manejo de los animales y el control de la privación de alimento durante 24 h antes de cada sesión de ensayo), fue conveniente trabajar con un pequeño grupo. Aun así, la participación efectiva en el entrenamiento básico fue de tres ratones por la muerte experimental (baja) del ratón rojo; luego, a medio término del entrenamiento avanzado, hubo otra baja, la del ratón azul. El experimento finalizó con dos ratones. En correspondencia con el nivel del entrenamiento por fase, las frecuencias de ingresos de cada ratón al LHA en el entrenamiento básico, ejecutado en tres sesiones con un total de 45 ensayos, fueron: azul = 10, verde = 17, blanco = 18 y, en el entrenamiento avanzado, ejecutado en ocho sesiones con un total de 89 ensayos, fueron: azul = 14, verde = 39, blanco = 36.
Instrumento
El instrumento de laboratorio denominado laberinto helicoidal ascendente (LHA) fue diseñado en el año 2017 y construido en el 2019 en el marco de la investigación del GPS interno (mapas espaciales) de los ratones en condiciones de aprendizaje discriminativo.
Según la descripción del LHA (véase el apéndice), este tiene dos componentes independientes físicamente para, de acuerdo con un control experimental, ser intercambiados de posición respecto del plano donde se ubiquen (descanso): uno de dirección antihoraria (izquierda-derecha) y el otro de dirección horaria (derecha-izquierda). Los sentidos de la dirección de los componentes son dados por la orientación del organismo (O) al ingresar al laberinto, así como al recorrer el helicoide tal como se aprecia en las figuras del apéndice. En la aplicación realizada se denominó LHA-A al componente antihorario y LHA-B al horario. También, por tratarse del primer uso del LHA, los parámetros de confiabilidad y validez de su aplicación, en orden evaluativo al aprendizaje por entrenamiento en el laberinto, serán propuestos más adelante en el procedimiento 6 y los obtenidos en resultado 3.
Procedimiento
Para lograr los objetivos y el contraste de hipótesis se procedió como sigue:
Construido el LHA (visto en material), se elaboró la guía de laboratorio con las definiciones funcionales del experimento, la descripción de las unidades de conducta esperadas pautando la observación directa por fase del estudio y el cronograma de actividades pre-durante-post ensayos por sesión. Así mismo, se elaboró el protocolo de ensayo (RAIS, 2021, anexo 3) para el registro de la información de acuerdo con las definiciones operacionales de la variable independiente por fase o situación experimental.
El registro de la información se llevó a cabo en el laboratorio de Psicología Animal de la Facultad de Psicología de la UNMSM en el último trimestre del año 2019, acondicionando el espacio autorizado para realizar los ensayos. Previamente, se capacitó en teoría y técnicas del aprendizaje a cinco estudiantes de la Facultad durante los meses de setiembre y octubre del mismo año.
En atención al respeto de los procedimientos en experimentos con animales propuestos por la Declaración de Helsinki de 1975 y la Ley 27265 (Ley Peruana vigente), dada la condición experimental de períodos de privación de alimento (24 h antes de cada ensayo), se asignó la custodia de los ratones a los estudiantes capacitados para su cuidado en general, así como su alimentación en los períodos de no privación de alimento y también de su traslado en jaulas transportables desde sus domicilios al laboratorio según cronograma. Así mismo, finalizada la prueba de laboratorio por aplicación del instrumento, se dispuso el cuidado definitivo de los ratones con sus respectivos custodios.
Técnica de investigación. La principal técnica de investigación del estudio fue el aprendizaje por condicionamiento instrumental discriminativo (Bower y Hilgard, 2004; Osgood, 1969). Cabe señalar que un proceso básico implicado en todo aprendizaje en un laberinto es el encadenamiento instrumental, según el cual el animal recorre por completo una ruta hasta llegar a la meta o fin del laberinto como resultado esperado desde la fase I del estudio. Lo opuesto es la conducta exploratoria referida como festoneo.
A cada fase (I y II) le correspondió diferente situación experimental (SE): SE 1 en la fase I y SE 2 en la fase II. En ambas SE, se utilizó el LHA con sus componentes adyacentes (uno al lado del otro) y, luego, como estímulo (E) fue bimodal (uno de dirección horaria sin alimento y el otro antihorario con alimento) y la respuesta (R) como unidad de conducta por ensayo siempre fue por elección libre del ratón, pero diferente por SE. En la SE 1, fue solo por la primera elección de A o de B. En la SE 2 fue más libre, de A y/o de B, siendo lo esperado una segunda elección, luego hubo casos donde la R fue secuencial (con dos elementos) o no secuencial (con un elemento).
Bajo el modelo metodológico E-O-R de la conducta en la teoría del aprendizaje (González, 1971, pp. 11-22) y la modalidad para abordar las relaciones entre situación y conducta, se encuentra el estudio de las funciones psicológicas (Fraisse, 1972, pp. 98-102). Por ejemplo, el grado de aprendizaje (R) en función de las repeticiones (E), donde las repeticiones no son más que la práctica (total de ensayos por sesión del experimento) en la que los sujetos experimentales (O) emiten la respuesta esperada o no, es decir, si por efecto de E ocurren cambios más o menos permanentes (Alarcón, 2013, pp. 49-50). Para evaluar dicho entrenamiento, se utilizaron dos medidas fundamentales en aprendizaje, medida del tiempo y de probabilidad: ambas en la presencia-ausencia (sí o no) de los niveles de la variable independiente o variable de estímulo (E).
Sobre las condiciones experimentales: a) La privación de alimento por 24 h previa a los ensayos de laboratorio fue para todos los sujetos experimentales en ambas fases, como mínimo tuvieron 24 h de recuperación luego del día programado para la sesión de ensayos (3 x 24 h entre sesiones de ensayo). El indicador de esta variable de estímulo es la respuesta de meta (Rm) o respuesta consumatoria del sujeto experimental (O) en la meta (acto de comer). b) El reforzamiento de meta fue diferente por fase: en la fase I fue de los dos componentes del LHA donde la condición es dada por la dirección del componente en la orientación horaria/antihoraria y, en la fase II, dicho reforzamiento fue de un solo componente, el antihorario.
En la fase I se trató de una experiencia invocada donde “la manipulación de la variable independiente se realiza sin que intervenga el experimentador” (Fraisse, 1972, p. 116). La invocación atendió a la variable intrínseca del instrumento (LHA) en cuanto a la ruta helicoidal de sus componentes de dirección antihoraria en A y horaria en B; luego, igualados por el refuerzo, se observó la conducta del ratón respecto de la dirección. El supuesto de la hipótesis invocada viene de los estudios de la neurociencia sobre las asimetrías posturales en los roedores respecto de la asimetría cerebral (Kolb y Wishaw, 2006, p. 310). La constatación de la hipótesis, vía el encadenamiento instrumental típico en laberintos de aprendizaje y memoria espacial, técnicamente importa en relación con la condición experimental del reforzamiento aleatorio (por sorteo) de los componentes del LHA en la fase II.
En la fase II se trató de una experiencia provocada donde se manipula la variable independiente (hipótesis experimental) vía reforzamiento y donde la condición o valor por nivel de la variable es A: dirección antihoraria reforzada, B: dirección horaria no reforzada. Empíricamente, se observó la conducta de ingreso por ensayo al LHA en A y/o B (o en A, o en B, o en A y B, o en B y A) donde se identificaron casos secuenciales y no secuenciales (A, B, A-B, B-A). Estos casos fueron analizados mediante la técnica del cuestionar ramificado (de una estructura en árbol): a) Medida la probabilidad (p) de ocurrencia, se clasificaron en casos relevantes (A y B-A) y no relevantes (B y A-B) y, medido el tiempo promedio en los ingresos válidos, se definió el caso relevante y válido (B-A). b) El caso resultante de a) denominado pivot por contener ingresos válidos en A y/o B fue analizado de manera análoga, previa identificación de los subcasos anidados en el caso pivot, con el subíndice sí/no por ingreso válido (Bsi-Asi, Bno-Asi, Bsi-Ano). c) Medida la p de ocurrencia, se clasificaron en subcasos relevantes (Bsí-Así, Bno-Así) y no relevante (Bsí-Ano). Luego, por frecuencia intersubcasos, se identificaron con subíndices numéricos (1 en sí-sí, 2 en no-sí, 3 en sí-no), siendo los subcasos relevantes (por frecuencia) también pertinentes (con p Rm por contener Asi). d) En función a la medida del tiempo en contexto de latencia (sí) y/o no latencia (no) según ausencia-presencia de la conducta indicadora de criterio (CIC) del aprendizaje discriminativo, los subcasos pertinentes se clasificaron en no CIC (B1-A1) y CIC (B2-A2) con igual frecuencia intrasubcaso (rasgo común).
Por lo general, en la psicología del aprendizaje, latencia es la demora (tiempo) en darse la respuesta de meta (Rm). Sin embargo, para dar cuenta del mapa en el aprendizaje discriminativo (objetivo general), la CIC es aquella donde los ratones, luego de ingresar al laberinto en el componente del LHA no reforzado (sin alimento), se regresan antes de llegar a la meta (m). Por lo tanto, stricto sensu, no podría haberse dado alguna Rm allí: definitivamente, es un contexto de no latencia. Luego, la categoría ingreso válido a los LHA (ingreso con llegada a la meta, no todos con Rm) tuvo la función de ubicar la CIC y separarla del conjunto o subcaso no CIC, donde los ingresos válidos se dieron en los dos componentes (con y sin reforzamiento en la meta), es decir, donde podía o no haberse dado la Rm: un mix de contextos no latencia-latencia.
En relación con la medida del tiempo en el contexto de no latencia-latencia en la CIC, viene al caso referirla por su relevancia como indicador del aprendizaje discriminativo en la fase II. La secuencia de dicha conducta es Bno-Así en correspondencia con los niveles de la variable independiente (B: dirección horaria no reforzada, A: dirección antihoraria sí reforzada). Dado que en Bno el ratón ingresa al componente B del LHA, pero se regresa sin alcanzar la meta, no fue posible registrar el tiempo al punto exacto del helicoide donde el animal gira 180° para iniciar el retorno, pues el tiempo registrado fue el de ida y vuelta, a la salida del laberinto.
Por lo expuesto, con el propósito de garantizar un contraste más licito de las magnitudes del tiempo entre los elementos de la CIC (Bno, Así), se introdujo una corrección constante dividiendo por 2 (la mitad) al tiempo registrado en Bno. La expresión matemática del tiempo ad hoc en Bno es tiempo Bno / 2 y será referida como tiempo ad hoc. Así, técnicamente se homologó, grosso modo, el tiempo de ida y vuelta en Bno con el tiempo de ida en Así. Finalmente, cabe precisar que la corrección mencionada no será necesaria de utilizarse helicoides translúcidos.
Acerca del control de las condiciones experimentales, además de la condición de privación de alimento (en ambas fases), el control del refuerzo de meta (variable de estímulo) fue distinto en cada fase del estudio. En la fase I fueron reforzados los dos niveles de la variable: A y B. En la fase II, fue reforzado el nivel A y no el B. Un control adicional fue la alternancia de las direcciones de los niveles de la variable (por la propiedad intercambiable de los componentes del LHA, instrumento visto en la sección Material) y se realizó en las últimas tres sesiones de la fase II para reducir los posibles efectos de los indicios externos a los mismos. Entonces, la posición de los componentes en las ocho sesiones del experimento fue como sigue: B-A (de la sesión 1 a la 5), A-B (en la sesión 6), B-A (en la sesión 7) y A-B (en la sesión 8).
Recolección de datos. De acuerdo con el protocolo de ensayo con el LHA, la recolección de datos se realizó por fases (con dos subfases en la primera), correspondiendo diferentes SE en cada fase. Según la guía de laboratorio, las actividades se cronogramaron en función a la condición de privación de alimento de los sujetos experimentales, 24 h antes del ensayo y otras 24 h de recuperación postsesión (véase el procedimiento 3). Los intervalos entre sesiones podían ser de 3 a 4 días. Por los feriados del calendario sin actividad en el laboratorio, hubo intervalos hasta de 7 días (1 en la fase I y 3 en la fase II) sin afectar la privación de alimento pre-sesión prevista por la custodia de los ratones (véase el procedimiento 2). En el laboratorio, la puesta del ratón en SE fue manual y consistió en ubicarlo en el centro posterior a la entrada de los helicoides, a la altura de sus bases juntas (adyacentes) cuyo perímetro fue cercado (véanse las figuras del apéndice).
En la fase I (Adaptación), con reforzamiento en la meta en ambos componentes del LHA (propia de la SE 1), hubo una subfase (1.1 Reconocimiento) cuyo propósito fue que el animal se acostumbre o familiarice con la situación. Se observó, en general, el festoneo de los ratones (conducta exploratoria), por lo cual no hubo registro alguno en el sentido productivo; fue muy breve (dos sesiones en total) hasta observar un ingreso definido al laberinto. En la siguiente subfase (1.2 Adaptación) si los ratones ingresaban a uno de los componentes del LHA, se daba fin al ensayo; fue menos breve (tres sesiones en total). En la fase II (Experimental) reforzada solo la meta del componente con dirección antihoraria (propia de la SE 2), si los ratones ingresaban a un helicoide (1° elección), se esperaba su ingreso al otro helicoide (2° elección) y, cuando llegaba a la meta, al menos en uno de ellos, se daba fin al ensayo; fue el de mayor duración (ocho sesiones en total).
Procesamiento de datos. Con la información recolectada, se elaboraron las bases de datos (BD) en Excel por fase del estudio a partir de la subfase 1.2 (Adaptación) que, en adelante, será referida como fase I. Las operaciones básicas en las BD fueron las siguientes: a) Contar las veces que el ratón ingresó al o a los componentes del LHA (en A o B en fase I y en A y/o B en fase II); luego, las veces que fueron ingresos válidos (IV o ingreso con llegada a la meta) y, por último, las veces que se dio la Rm (en A o B en fase I y en A en fase II). b) Cuenta del tiempo en segundos (s) de los IV por sesión en ambas fases.
Con dicho procesamiento, se elaboraron diversas tablas y figuras, según la organización de los datos y en función a los indicadores de la variable dependiente (data) por la evaluación del entrenamiento de aprendizaje en el LHA: a) En ambas fases, para obtener los parámetros de confiabilidad y validez de la aplicación instrumental, se utilizó la probabilidad (p) de éxito de la conducta de aprendizaje, razón de su frecuencia relativa (f) sobre la frecuencia acumulada (F) del total de observaciones (p = f/F) expresada porcentualmente (% = f/F * 100) y también se utilizó la frecuencia observada (fo) para el contraste con la frecuencia esperada (fe) mediante el estadígrafo no paramétrico Chi cuadrado de Pearson. b) En la fase II, se utilizó la media aritmética () o promedio del tiempo por sesión de ensayos para obtener la curva de aprendizaje (CA) en los casos y subcasos relevantes.
Confiabilidad y validez. En el contexto de la primera aplicación del LHA, en respuesta a la pregunta si funciona como todo laberinto de aprendizaje vía encadenamiento instrumental, el indicador de éxito de dicha conducta en ambas fases será el porcentaje de ingresos válidos por ingresos, tanto el global como el específico de los componentes del LHA. Luego, en respuesta a la pregunta qué tanto funciona el LHA en condiciones de reforzamiento de sus componentes, en el entendido de que Rm consolida la conducta de encadenamiento instrumental en el aprendizaje, el indicador en la fase I será el porcentaje de Rm por ingreso válido (global y específico de los componentes) y, en la fase II, el indicador será el porcentaje de Rm por ingreso válido en LHA-A (el componente reforzado).
Lo propuesto corresponde a una línea base de confiabilidad y validez con relación al encadenamiento instrumental, técnicamente condición necesaria en el control experimental en fase II y metodológicamente condición suficiente en la interfase. Luego, a los criterios propuestos, se debe sumar la cristalización de conductas de aprendizaje en el LHA en la sutil continuidad de la fase II.
Prueba de hipótesis. El contraste de la hipótesis invocada en fase I y experimental en fase II se realizó mediante la prueba Chi cuadrado (χ²), útil para medir la asociación o independencia al nivel de medición de variables en escala nominal y se aplica a variables dicotómicas en la prueba de hipótesis nula (H0). Cuando el valor de χ² es pequeño, menor al valor crítico (VC) por los grados de libertad (gl) a un nivel de p, se interpreta que las variables son independientes y si es grande, que son asociadas. Cuando fo = fe (idénticas) entonces χ² = 0 (Alarcón, 2013, pp. 297-301). Según Henry E. Garret, Ji Cuadrado (χ²) compara la divergencia o concordancia de las fo, cuyo procesamiento en tablas de contingencia (TC) 2 x 2 cuando las fe son de igual p (H0) recomienda la fórmula abreviada: χ² = 2(fo - fe)2 / fe (Garret, 1974, pp. 284-288, 291-293).
En la fase II, el contraste de H0 por χ² será en el caso general (construcción supracontextual de la casuística) y, en el contexto intersubcaso, mientras χ² ≠ 0 (p ˂ .05). En el contexto intrasubcaso, la prueba de la hipótesis alterna (H1) será, además, por la medida del tiempo ilustrado gráficamente en la CA, decisoria en la identificación de los aprendizajes netos en el LHA, según las expresiones o unidades de conducta relevantes y válidamente irreductibles: subcasos pertinentes de secuencia B-A.
El tiempo como la longitud o el peso indican variables del nivel de medición en escala de razón con el cero absoluto verdadero, donde esa magnitud se interpreta como ausencia absoluta de la propiedad (Alarcón, 2013, pp. 267-268). Al obtener la medida del tiempo para la CA, se utilizó la media aritmética (), estadígrafo paramétrico aplicable al nivel de medición de variables en escalas de intervalos, donde la medida de la propiedad es (VD) por sesión de ensayos o intervalos de medición (VI).
El cálculo del tiempo por la respuesta molar será en los subcasos pertinentes con el objeto de comparar dicha respuesta en el contexto intrasubcaso (latencial y/o no latencial) bajo el efecto cero por frecuencias idénticas en la medida de la VD (χ² = 0) de los valores de los niveles de la VI (A: dirección antihoraria reforzada, B: dirección horaria no reforzada). Complementariamente a lo dicho en el procedimiento 3 acerca del subcaso CIC (Bno-Así), la definición operacional se hizo en dos momentos siempre en presencia de Así en la secuencia: por su expresión general en ausencia de ingresos válidos en Bno (definición por extensión) y por su expresión específica en presencia de ingresos con tiempo no meta, tal que tiempo B2 ≠ 0 (definición por intensión).
RESULTADOS
Según el procedimiento detallado, se exponen los principales resultados obtenidos de las tablas y figuras que resumen los análisis de la data por fase (I y II) y su correspondiente situación experimental (SE): SE 1 y SE 2, así como sus aportes a la confiabilidad y validez y a la prueba de hipótesis.
Estadística de la Fase I o SE 1
Estos resultados corresponden a los valores de los niveles de la variable independiente en la hipótesis invocada (variable no manipulada) así como los indicadores para medir la variable dependiente en relación con la producción del encadenamiento instrumental en el LHA como se muestra a continuación.
Tabla 1 Frecuencia de ingresos, ingresos válidos y respuesta de meta (Rm) en el componente A o B del laberinto helicoidal ascendente (LHA) por sesión y sus totales en la fase I
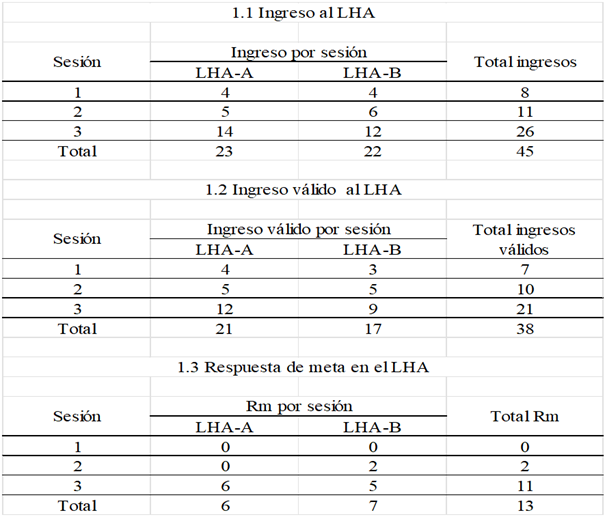
Nota: LHA -A y LHA-B = componentes del LHA
La tabla 1 y sus tres secciones tienen en común las tres sesiones que se realizaron en esta fase y permite apreciar cómo se distribuyeron los ingresos (I) en los componentes del LHA (en A o en B) cuyo total fue 45 ensayos (igual I) realizados (sección 1.1). El total de ingresos válidos (IV) fue 38 (sección 1.2) y el total de respuesta a la meta (Rm) fue 13 (sección 1.3). Se obtuvieron los siguientes resultados:
El total de IV en el LHA sobre el total de I fue 84 % (38/45 * 100) y de la p de IV en LHA-A fue 55 % (21/38 * 100) y en LHA-B fue 45 % (17/38 * 100).
Según la prueba χ² de las f o en IV por componente del LHA, f o = 21 en LHA-A y f o = 17 en LHA-B en contraste con las f e iguales por componente [f e = (21 + 17) / 2 = 38/2 = 19] se obtuvo χ² = .4211. Para 1 gl (por TC 2 * 2) y p = .50 por H0 y según la tabla de VC de χ² es el .455. Desde que .4211 (p = .5154) ˂ .455 (p = .50) no se puede rechazar la H0.
El total de Rm en el LHA sobre el total de IV fue 34 % (13/38 * 100) y de la p de Rm en LHA-A fue 46 % (6/13 * 100) y en LHA-B fue 54 % (7/13 * 100).
Según la prueba χ² de las f o en Rm por componente del LHA, f o = 6 en LHA-A y f o = 7 en LHA-B en contraste con las f e iguales por componente [f e = (6 + 7) / 2 = 13/2 = 6.5] se obtuvo χ² = .0769. Para 1 gl (por TC 2 * 2) y p = .50 por H0 y según la tabla de VC de χ² es el .455. Desde que .0769 (p = .7815) ˂ .455 (p = .50) no se puede rechazar la H0.
Estadística de la Fase II o SE 2
Estos resultados corresponden a los valores de la VI de la hipótesis experimental (variable manipulada), así como los indicadores para medir la variable dependiente en relación a los aprendizajes instrumentales producidos en el LHA: incidental, condicionado y discriminativo, como se muestra a continuación.
Tabla 2 Frecuencia de sujetos, ensayos y casos por sesión con el laberinto helicoidal ascendente (LHA) y sus totales en la fase II
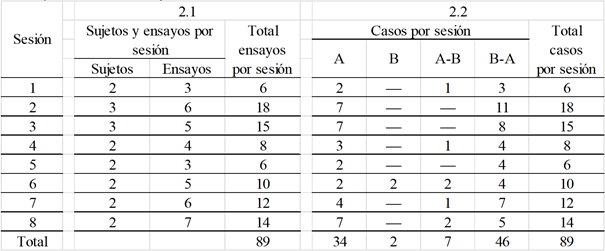
Nota: El símbolo - en las celdillas indica que el caso no se produjo en la sesión.
La tabla 2 y sus dos secciones tienen en común las ocho sesiones (1° columna) con un total de 89 ensayos o casos que se realizaron en esta fase, así como su distribución por sesión, siendo específico en la sección 2.1 el número de sujetos y ensayos por sesión y, en la sección 2.2, los cuatro tipos de casos configurados de las respuestas de los sujetos por su(s) ingreso(s) en el LHA (en A y/o en B). Se obtuvo el siguiente resultado:
Por su mayor frecuencia acumulada de las sesiones, los casos relevantes fueron el caso A = 34 y el caso B-A = 46, cuya suma = 80 sobre el total de casos constituye 90 % de la p de ocurrencia (80/89 * 100) del cual A = 42 % (34/80 * 100) y B-A = 58 % (46/80 * 100).
Tabla 3 Frecuencia de ingresos e ingresos válidos en los componentes A y/o B del laberinto helicoidal ascendente (LHA) en los casos y sus totales en la fase II
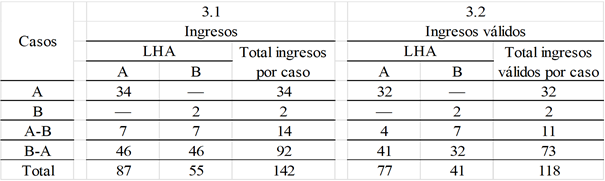
Nota: El símbolo - en las celdillas indica la ausencia del componente del LHA en el caso.
La tabla 3 y sus secciones (3.1 y 3.2) tienen en común los cuatro casos configurados en esta fase (1° columna), apreciándose en qué casos se produjo merma de la frecuencia de I a IV en A o en B del LHA. Se obtuvieron los siguientes resultados:
El total de IV sobre el total de I fue 83 % (118/142 * 100) y de la p de IV en el LHA-A fue 65 % (77/118 * 100) y en LHA-B fue 35 % (41/118 * 100) .
Según la prueba χ² de las f o en IV por componente del LHA, f o = 77 en LHA-A y f o = 41 en LHA-B en contraste con las f e iguales por componente [f e = (77 + 41) / 2 = 118/2 = 59] se obtuvo χ² = 10.9831. Para 1 gl (por TC 2 * 2) y p = .50 por H0 y según la tabla de VC de χ² es el .455. Desde que 10.9831 (p = .0009) > .455 (p = .50) se puede rechazar la H0.
Tabla 4 Frecuencia por sesión de los casos válidos en el laberinto helicoidal ascendente (LHA) y de la respuesta de meta (Rm) en el componente LHA-A y sus totales en la fase II
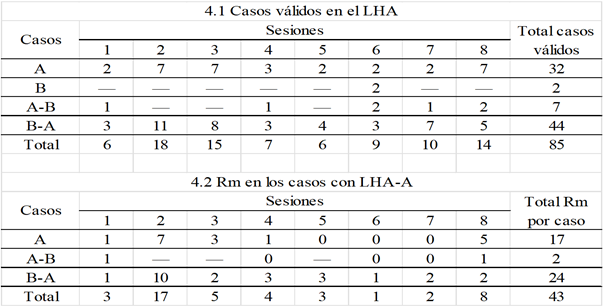
Nota: En las celdillas: el símbolo - indica que el caso no se produjo válidamente en la sesión.
En la sección 4.1 de la tabla 4 se encuentran los casos válidos por sesión (con IV en los componentes A y/o B del LHA, visto en tabla 3) decantados de los casos relevantes, configurados solo por I (visto en tabla 2), apreciándose de allí en qué casos y en qué sesión se produjo la merma (89 - 85 = 4); luego, en la sección 4.2, se encuentran las Rm en los casos con LHA-A (componente reforzado en la meta), por lo cual aquí no aparece el caso B. Se obtienen los siguientes resultados:
El porcentaje de p de ocurrencia de casos válidos sobre el total de casos fue 96 % (85/89 * 100).
Los casos válidos y relevantes (A y B-A) por su mayor frecuencia acumulada de las sesiones (32 + 44 = 76) sobre el total de casos válidos constituyen 89 % (76/85 * 100) de la p de ocurrencia, del cual A = 42 % (32/76 * 100) y B-A = 58 % (44/76 * 100).
El porcentaje de p de ocurrencia del total Rm en los casos con LHA-A = 43 sobre el total de ingresos válidos en el componente = 77 (visto en tabla 3) fue 56 % (43/77 * 100).
En los casos válidos y relevantes (A y B-A) el porcentaje de p de ocurrencia de Rm, sumadas sus frecuencias (17 + 24 = 41) sobre el total Rm fue 95 % (41/43 * 100), del cual A = 41 % (17/41 * 100) y B-A = 59 % (24/41 * 100).
Tabla 5 Promedio () del tiempo (s) a la meta en los componentes del laberinto helicoidal ascendente (LHA) por sesión según el caso general y los casos particulares en la fase II
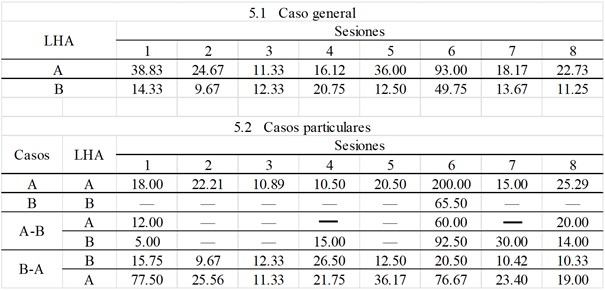
Nota: El símbolo - en las celdillas indica que el caso no se produjo en la sesión y el mismo símbolo en negrita indica que el caso válido en la sesión (visto en la sección 4.1 de la tabla 4) solo tuvo ingresos (sin meta) en su componente A.
En la tabla 5 se encuentra el tiempo promedio del caso general en el componente A o B del LHA, suponiendo la independencia de la respuesta por componente, un supracontexto referencial (sección 5.1) y de los casos particulares en los componentes A y/o B tal como fueron producidos en esta fase II (sección 5.2). Apreciando la evolución del tiempo por sesión en los casos particulares respecto del caso general, se obtuvieron los siguientes resultados:
Los promedios () del tiempo (s) de la última sesión vs. primera sesión en los componentes del LHA del caso general fueron, en LHA-A: en sesión 8 = 22.73s ˂ 38.83s = en sesión 1 y, en LHA-B: en sesión 8 = 11.25s ˂ 14.33s = en sesión 1.
Los promedios () del tiempo (s) de la última sesión vs. primera sesión en los componentes del LHA del caso B-A fueron, en LHA-B: en sesión 8 = 10.33s ˂ 15.75s = en sesión 1 y, en LHA-A: en sesión 8 =19.00s ˂ 77.50s = en sesión 1.
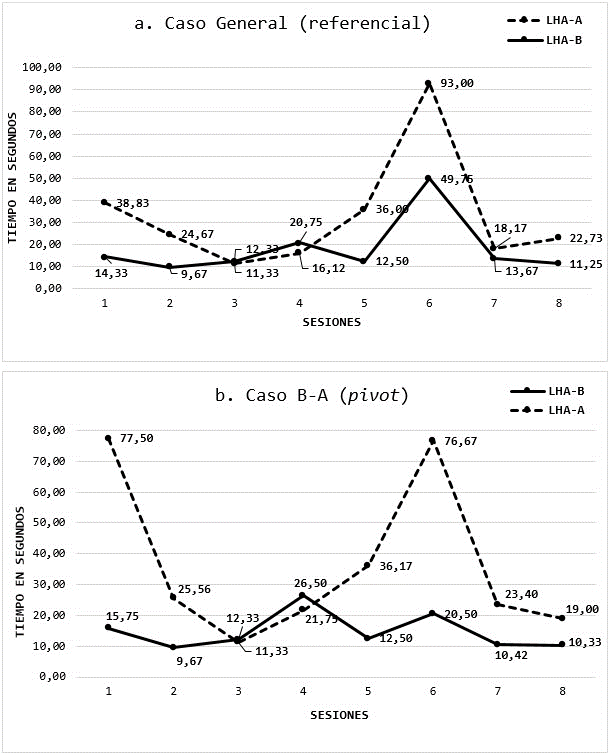
Figura 1. Contraste de las curvas de aprendizaje por componente del LHA (A, B) del caso general (supra contexto referencial) y del caso particular (pivot).
La figura 1, derivada de la tabla 5 muestra la curva de aprendizaje tanto del caso general (gráfica a) como del caso B-A (gráfica b), siendo este el único de los casos particulares con dicho comportamiento, excluyendo al caso A considerado válido y relevante antes de este resultado, por lo cual el caso B-A fue denominado caso pivot porque es allí donde se debe encontrar la conducta indicadora de criterio (CIC) del aprendizaje discriminativo.
Tabla 6 Frecuencia de ingresos válidos en los componentes A y/o B del laberinto helicoidal ascendente (LHA) de los subcasos del caso B-A (pivot) y de la Respuesta de Meta (Rm) en los subcasos pertinentes por sesión y sus totales en la fase II
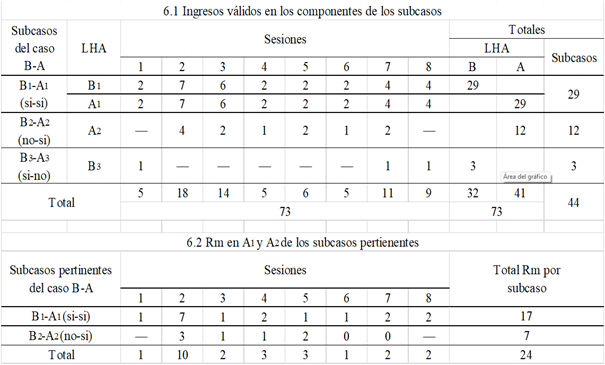
Nota: En los paréntesis de los subcasos, sí = latencia (ingresos con meta) y no = no latencia (ingresos sin meta) en el respectivo componente del LHA. En las celdillas, el símbolo - indica que el subcaso no se produjo en la sesión.
En la sección 6.1 de la tabla 6 se encuentran los tres subcasos extraídos del caso B-A (pivot) clasificados por sus IV en los componentes A y/o B del LHA, indicados por los paréntesis que siguen a cada denominación: (sí-sí), (no-sí) y (sí-no); por ejemplo, en el subcaso B2-A2 (no-sí) hubo en total 12 ingresos (sin meta) en B2 y 12 ingresos válidos (con meta) en A2. En la sección 6.2 se encuentran las Rm en los subcasos con LHA-A (sí) como fue en A1 y A2 de los subcasos relevantes por frecuencia y ahora pertinentes (donde podía darse Rm) excluido el subcaso B3-A3 (sí-no), no relevante por frecuencia y no pertinente por Ano (donde no podía darse Rm). De esta tabla se obtuvieron los siguientes resultados:
Las frecuencias de los subcasos relevantes en el LHA fueron B1-A1 = 29 y B2-A2 = 12 que sumados (29 + 12 = 41) sobre el total de subcasos constituyen 93 % de la p de ocurrencia (41/44 * 100) del cual B1-A1 = 71 % (29/41 * 100) y B2-A2 = 29 % (12/41 * 100).
Según la prueba χ² de las f o en los subcasos relevantes en el LHA, f o = 29 en B1-A1 y f o = 12 en B2-A2 en contraste con las f e iguales por subcaso [f e = (29 + 12) / 2 = 41/2 = 20.5] se obtuvo χ² = 7.0488. Para 1 gl (por TC 2 * 2) y p = .50 por H0 y según la tabla de VC de χ² es el .455. Desde que 7.0488 (p = .0079) > .455 (p = .50) se puede rechazar la H0.
El total de Rm en el LHA-A (A1+A2) de los subcasos pertinentes sobre el total en el componente A = 41 fue 59 % de la p de ocurrencia (24/41 * 100) del cual Rm en el subcaso B1-A1 = 71 % (17/24 * 100) y en el subcaso B2-A2 = 29 % (7/24 * 100).
Según la prueba χ² de las f o de Rm en LHA-A de los subcasos pertinentes, f o = 17 en B1-A1 y f o = 7 en B2-A2 en contraste con las f e iguales por subcaso [f e = (17 + 7) / 2 = 24/2 = 12] se obtuvo χ² = 4.1667. Para 1 gl (por TC 2 * 2) y p = .50 por H0 y según la tabla de VC de χ² es el .455. Desde que 4.1667 (p = .0412) > .455 (p = .50) se puede rechazar la H0.
Tabla 7 Promedio () del tiempo (s) a la meta en el laberinto helicoidal ascendente (LHA) por sesión en los subcasos del caso B-A (pivot) según la respuesta no molar (tiempo por componente) o molar (tiempo compuesto por sumatoria de los componentes) en contextos de latencia o de no latencia en la fase II
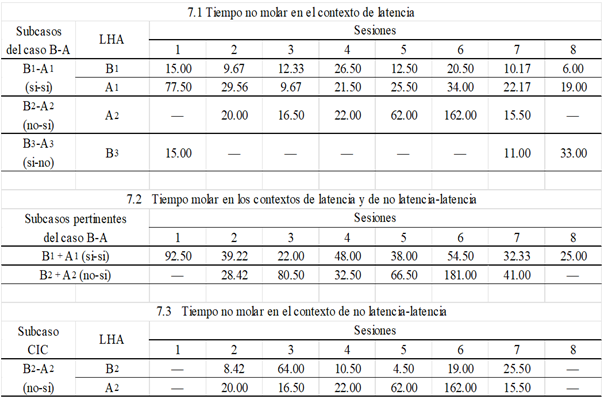
Nota: En los paréntesis de los subcasos, sí = latencia (ingresos con meta) y no = no latencia (ingresos sin meta) en el respectivo componente del LHA. El símbolo - en las celdillas indica que el subcaso no se produjo en la sesión.
El tiempo de B2 tanto en el molar de la sección 7.2 como en el no molar de la 7.3 fue ad hoc (visto en método).
B1+A1 y B2+A2 indican la respuesta molar del tiempo.
CIC = conducta indicadora de criterio (del aprendizaje discriminativo).
En la sección 7.1 de la tabla 7 se encuentran los tiempos promedios por sesión en los componentes del LHA de los subcasos del caso B-A (pivot) en el contexto de latencia en LHA-A y/o LHA-B (B1, A1, A2 y B3). En la sección 7.2 se encuentran los promedios compuestos por la respuesta molar del tiempo por sesión de los subcasos pertinentes: B1-A1 en el contexto de latencia (con meta en ambos componentes) y B2-A2 en el contexto de no latencia-latencia (no meta en un componente y meta en el otro). En la sección 7.3 se encuentran los tiempos promedios por componente del subcaso B2-A2 en su contexto no latencia-latencia, subcaso de la CIC del aprendizaje discriminativo. Correspondiendo al LHA-B2 (tanto en la sección 7.2 como en la 7.3) el tiempo ad hoc (visto en método, procedimiento 3) y en orden contextual de los subcasos, se obtuvieron los siguientes resultados:
En el contexto latencial, los promedios () del tiempo (s) no molar de la última sesión vs. primera sesión en los componentes del subcaso B1-A1 fueron, en LHA-B1: en sesión 8 = 6.00s ˂ 15.00s = en sesión 1 y, en LHA-A1: en sesión 8 =19.00s ˂ 77.50s = en sesión 1.
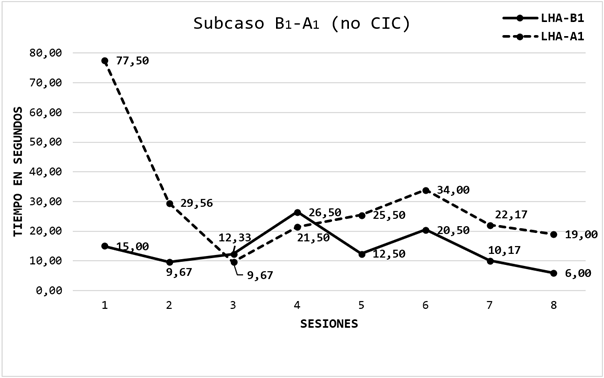
La figura 2, derivada de la sección 7.1 de la tabla 7, muestra las curvas de aprendizaje en los componentes del subcaso B1-A1 apreciándose gran semejanza con las del caso pivot (visto en b de figura 1) en los cursos del tiempo por sesión con excepción de la sesión 6 donde LHA-A1 no tuvo un gran pico como en LHA-A del caso pivot, caso de donde proviene en mayor cuantía (visto en tabla 6, sección 6.1). Al ser LHA-B1 componente no reforzado, el aprendizaje operado en él es instrumental incidental (no motivado) y al ser LHA-A1 componente reforzado el aprendizaje en él es instrumental condicionado. En el intracontexto secuencial del subcaso se dieron aprendizajes por igual, independientes de la condición reforzamiento, es decir, el reforzamiento no provocó la conducta discriminante de dirección horaria en B1 y antihoraria en A1, por lo cual fue denominado subcaso de la no CIC.
En el contexto latencial los promedios () del tiempo (s) no molar de la última sesión vs. la primera sesión en el LHA-A2 del subcaso B2-A2 fue: en sesión 7 = 15.50s ˂ 20.00s = en sesión 2.
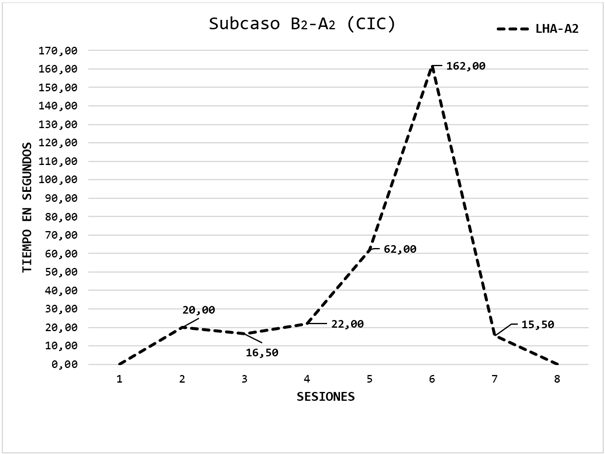
Figura 3. Nota: Curva de aprendizaje en el componente A2 del subcaso de la conducta indicadora de criterio = CIC (por ausencia de ingresos válidos en B2)
La figura 3, derivada de la sección 7.1 de la tabla 7, muestra la curva de aprendizaje del componente A2 del subcaso B2-A2 apreciándose gran semejanza con la del componente A del caso pivot (visto en b de figura 1) en las sesiones comparables (de la sesión 2 a la 7) en los cursos del tiempo con picos en las sesiones 5 y 6, pero en A2, el de la sesión 5 casi duplica y el de la sesión 6 más que duplica a los del caso pivot, caso de donde proviene en menor cuantía (visto en tabla 6, sección 6.1). Sin embargo, la tendencia al alza del tiempo en esas sesiones tuvo una gran caída en la recta final con un tiempo menor al de la sesión inicial, resultando una curva de aprendizaje. Al ser LHA-A2 el componente reforzado del LHA en el subcaso B2-A2 el aprendizaje instrumental operado en él sería condicionado discriminativo, pues en el intracontexto secuencial del subcaso se dio aprendizaje en el componente reforzado (A2) por IV presentes y en el no reforzado (B2) por IV ausentes (no latencia). Luego, la condición reforzamiento provocó la conducta discriminante de la dirección horaria en B2 y antihoraria en A2, por lo cual fue denominado subcaso de la CIC.
En el contexto latencial los promedios () compuestos por respuesta molar del tiempo (s) de la última sesión vs. primera sesión del subcaso no CIC (B1+A1) fue: en sesión 8 = 25.00s ˂ 92.5s = en sesión 1.
En el contexto no latencial-latencial los promedios () compuestos por la respuesta molar del tiempo (s) de la última sesión vs. primera sesión del subcaso CIC (B2+A2) fue: en sesión 7 = 41.00s > 28.42s = en sesión 2.
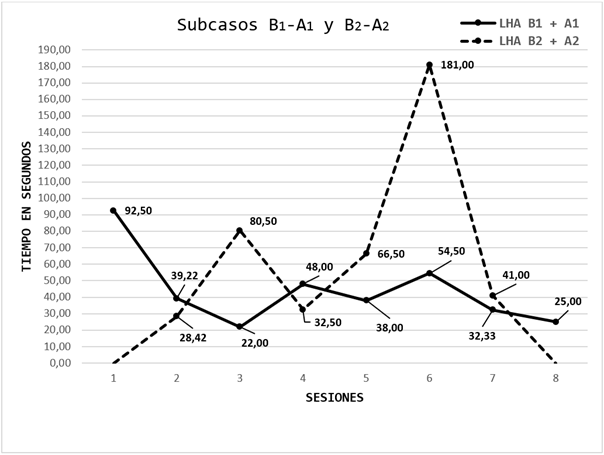
Figura 4. Contraste de las curvas por la respuesta molar del tiempo en los subcasos no CIC (B1-A1) y CIC (B2-A2 )
La figura 4, derivada de la sección 7.2 de la tabla 7, muestra las curvas de la respuesta molar en los subcasos B1-A1 y B2-A2 apreciándose una curva de aprendizaje en el subcaso no CIC (B1+A1), concordante con los aprendizajes operados en cada uno de sus componentes (visto en figura 2), y una curva opuesta al aprendizaje en el subcaso CIC (B2+A2) con 2 picos, uno en la sesión 3 y el otro en la sesión 6. Respecto de la curva de aprendizaje en LHA-A2 (visto en figura 3) no hubo pico en la sesión 3 y en la 6 el pico se acentúa naturalmente por la contribución del tiempo en B2. Pues, para darse esa curva en el subcaso CIC, en la primera sesión el tiempo en B2 tuvo que ser menor que en A2 y, por el contrario, en la última sesión el tiempo tuvo que ser mayor que en A2.
En el contexto no latencial-latencial los promedios () del tiempo (s) no molar de la última sesión vs. primera sesión en los componentes del subcaso CIC (B2-A2) fueron, en LHA-B2: en sesión 7 = 25.50s > 8.42s = en sesión 2 y, en LHA-A2: en sesión 7 = 15.50s ˂ 20.00s = en sesión 2.
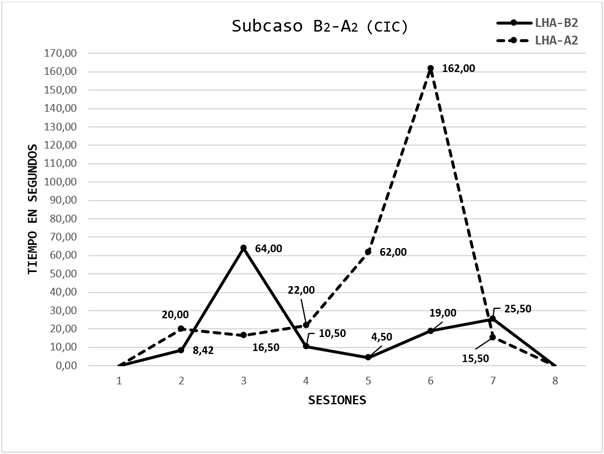
Figura 5 Contraste de las curvas de los componentes del subcaso CIC: B2 en el contexto no latencial y A2 en el latencial por la respuesta no molar del tiempo
La figura 5, derivada de la sección 7.3 de la tabla 7, muestra la curva en cada uno de los componentes del subcaso CIC (B2-A2) apreciándose una curva opuesta al aprendizaje en LHA-B2 con un pico en la sesión 3 y, en la curva de aprendizaje en LHA-A2, un gran pico en la sesión 6, ambos picos contribuyentes destacados en la respuesta molar B2+A2 (vista en la figura 4) cuyo pico en la sesión 3 se debió al tiempo del componente B2 en esa sesión y su gran pico en la sesión 6 se incrementó aún más por la tendencia al alza del tiempo de ese componente en su recta final, tal como se supuso del comportamiento en esa respuesta. Es evidente que los cursos del tiempo en los componentes del subcaso a lo largo de las sesiones (excepto en la 6) fueron de orden opuesto y, en la primera y última sesión, ese orden fue: de menor a mayor en B2 y de mayor a menor en A2.
Confiabilidad y Validez Experimental
De acuerdo con la propuesta para estimar la confiabilidad y validez de la aplicación del LHA por la evaluación del aprendizaje de los ratones, se indican los porcentajes (%) de éxito en encadenamiento instrumental o ingresos con alcance de meta (de p de IV por I) y de su consolidación (de p de Rm por IV). Tanto el % global en ambos componentes del LHA (en A y B) como el % específico, en cada uno de ellos (en A o en B), se encuentran en los apartados 1 y 2 de la sección a los cuales se remite según se trate de resultados (R) en fase I (SE 1) o en fase II (SE 2).
En fase I, el % de I con llegada a la meta fue 84 %: 55 % en A y 45 % en B (R.1.1) y el % de Rm en meta fue 34 %: 46 % en A y 54 % en B (R.1.3). Globalmente, el encadenamiento instrumental fue alto (84 %) y su consolidación fue baja (34 %) debido, probablemente, al período de entrenamiento breve en la fase (tres sesiones en total). Dado que es deseable el correspondiente aprendizaje instrumental condicionado, la experiencia de los ratones no cristalizó en una curva de aprendizaje según el tiempo promedio a meta por sesión. De los resultados globales en encadenamiento instrumental y su consolidación, específicamente en los componentes del LHA, fueron medianos y balanceados: en A (55 % y 46 %) y en B (45 % y 54 %). Anotamos que esta observación íntimamente ligada a la hipótesis invocada en SE 1, objeto de prueba en el siguiente apartado (R.4) sumará confiabilidad y validez a la interfase, condición necesaria y suficiente (técnica y metodológicamente) del paso de fase I a II.
En fase II, el % de I con llegada a la meta fue 83 %: 65 % en A y 35 % en B (R.2.2) y, el % de Rm en meta de A (con alimento) fue 56 % (R.2.6). Globalmente, el encadenamiento instrumental fue alto (83 %) y su consolidación en A fue mediana (56 %). Del resultado global en encadenamiento instrumental, específicamente, en los componentes del LHA fueron: más que mediano en A (65 %) y bajo en B (35 %). Anotamos que esta observación ligada indirectamente a la hipótesis experimental en SE 2 será objeto de prueba en el siguiente apartado y corresponde al caso general como también lo serán las unidades de análisis identificadas en el tamizaje de los casos dados a los subcasos relevantes y pertinentes, subcasos ligados directamente a la hipótesis experimental, por lo cual procedimentalmente sumarán confiabilidad y validez en esta SE (R.2.1, 2.4, 2.5, 2.7, 2.10 y 2.12).
Prueba de Hipótesis Invocada y Experimental
Organizada en dos subapartados (no numerados) con una frase que resume el contenido de las pruebas por fase del estudio (en negrita), se codifican correlativamente de 4.1 a 4.5 y cuando son contrastes relacionados se subcodifican en a, b, c. También aquí se remite a los resultados (R) puntuales de los apartados 1 y 2 de la sección según se trate de la fase I o II.
Adaptación del ratón albino al LHA en fase I
Por contraste de f o y f e en la prueba chi cuadrado (χ²) por hipótesis nula (H0) de los indicadores del encadenamiento instrumental en los valores por nivel de la VI (A: dirección antihoraria, B: dirección horaria) en correspondencia a los componentes del LHA (A, B) se obtuvo:
Por IV (alcance de meta en A o B) no se puede rechazar la H0 (R.1.2) realmente a un nivel de probabilidad de .50 dado que χ² = .4211 ˂ VC = .455 (p = .50).
Por Rm (consumo de alimento en meta de A o B) no se puede rechazar la H0 (R.1.4) realmente a un nivel de probabilidad de .70 dado que χ² = .0769 ˂ VC = .148 (p = .70).
Luego, según la hipótesis de igual probabilidad (50/50), las f o son concordantes. Dicho de otra manera, cuando los ratones ingresaron válidamente a los componentes del LHA y lo mismo cuando emitieron Rm lo hicieron por igual en A antihoraria o en B horaria, es decir, la conducta direccional fue aleatoria, constatándose así el supuesto de la experiencia invocada en la SE de la fase y determinando cómo fue la adaptación del ratón albino al LHA.
Aprendizaje no discriminativo y discriminativo en el LHA en fase II
Caso general y caso pivot. En el marco del análisis de la casuística, en la fase se construyó el caso general que, por contener a todos los casos concretamente dados, se considera un supracontexto referencial de los mismos. Llegado el momento, cobra importancia su conexión con el caso pivot:
En el caso general, por IV en A o B se puede rechazar la H0 (R.2.3) realmente a un nivel de probabilidad de .001 (H1) dado que χ² = 10.9831 > VC = 10.827 (p = .001).
Los valores del tiempo a la meta en los componentes del caso general (R.2.8) y en los del caso B-A o pivot (R.2.9) fueron análogos con relación a sus CA (figura 1).
Aun como resultado provisional (por análisis de casuística en curso) el caso pivot reproduce los aprendizajes instrumentales, incidental en B y condicionado en A, como en el caso general. Es decir, la divergencia por el factor frecuencia en el general, no manifiesto en el pivot cede el paso al factor tiempo en conexión.
Subcaso del aprendizaje no discriminativo. Los subcasos relevantes y, a la vez, pertinentes (unidades de conducta irreductibles) obtenidos del análisis, anidados en el caso pivot de donde provienen en mayor o menor cuantía intersubcaso, tienen el rasgo común de la igualdad frecuencial intrasubcaso (χ²=0), por lo cual, agotado el contraste por el factor frecuencia, se prosigue la prueba de hipótesis por el factor tiempo en la determinación de las modalidades de aprendizaje y la inferencia de los mapas o GPS interno del ratón albino en el LHA:
En los subcasos relevantes, por mayor frecuencia de B1-A1 que B2-A2 se puede rechazar la H0 (R.2.11) realmente a un nivel de probabilidad de .01 (H1), dado que χ² = 7.0488 > VC = 6.635 (p = .01) y, en los subcasos pertinentes, por mayor Rm (consumo de alimento en meta de A) en B1-A1 que B2-A2 se puede rechazar la H0 (R.2.13) realmente a un nivel de probabilidad de .05 (H1) dado que χ² = 4.1667 > VC = 3.841 (p = .05).
Por tiempo a la meta en el contexto latencial no molar del subcaso B1-A1 hubo aprendizaje independiente de la condición reforzamiento en la fase (R.2.14) que no provocó la CIC (figura 2). Bajo ningún efecto intrasubcaso del factor frecuencia (χ² = 0), la respuesta en los niveles de la variable se dio en independencia del refuerzo (Bsí-Así): los aprendizajes instrumentales fueron incidental en B1 (no motivado) y condicionado en A1 (motivado); por lo tanto, en el subcaso el aprendizaje fue no discriminativo. De lo cual se infiere que los ratones construyeron mapas de orientación dominantemente egocéntricos: de dirección horaria en B1 y antihoraria en A1.
Por tiempo a la meta en el contexto latencial no molar del subcaso B2-A2 hubo aprendizaje (R.2.15). Fue un aprendizaje instrumental condicionado en la oposición ausencia-presencia de IV en los niveles de la variable independiente (Bno-Así), caso límite de una diferencia cualitativa por diseño (definición por extensión) donde se presume el efecto de la condición reforzamiento en la fase, provocando la CIC (figura 3); por lo tanto, el aprendizaje fue discriminativo en su expresión general.
Derivación del tiempo molar al no molar en el subcaso del aprendizaje discriminativo:
Por tiempo a la meta de la respuesta molar en los subcasos pertinentes B1-A1 y B2-A2 (R.2.16 y 2.17) las curvas fueron: de aprendizaje en el subcaso no CIC y opuesta al aprendizaje en el subcaso CIC (figura 4). En ambos subcasos, bajo ningún efecto intracontexto del factor frecuencia (χ² = 0), pues en el cálculo del tiempo molar en la CIC la frecuencia I en B2 = frecuencia IV en A2, se muestra que en el molar la suma de cursos del tiempo del mismo orden en la primera y última sesión de B1-A1 (figura 2) conserva el mismo orden y en B2-A2, conocido ese orden del tiempo en A2 (figura 3), el molar no lo conserva, hecho explicado por el curso del tiempo en B2.
Por tiempo a la meta en el contexto no latencial-latencial del subcaso B2-A2 (CIC), ya definido por extensión ahora se especifica (definición por intensión) en presencia de I con tiempo B2 ≠ 0 (en ausencia de IV) comparado con el tiempo A2 (en presencia de IV) en su deriva de primera a última sesión (R.2.18) o en sus cursos en las sesiones (figura 5). Luego, por aprendizaje discriminativo, la respuesta del tiempo diferencial se dio bajo el efecto de la condición reforzamiento y los cursos del tiempo se dio en oposición aparentemente concomitante de la dirección horaria en B2 y antihoraria en A2 de donde se podría presumir relación de interacción de respuesta en la secuencia Bno-Así. Aun así, al no haber cristalizado un aprendizaje en Bno (más bien con respuesta del tiempo demorado en no latencia) no se puede inferir que los ratones construyeron un mapa integrando la rotación de la dirección en Así (con respuesta de aprendizaje); por lo tanto, el mapa fue de orientación egocéntrica por discriminación demorada.
CONCLUSIONES
Se establece la línea base de confiabilidad y validez del LHA por el alto porcentaje de logro del encadenamiento instrumental por los ratones albinos en ambas fases del estudio y su consolidación por el logro de Rm incrementada en fase II (R.3). Asimismo, en esta fase se produjeron diferentes aprendizajes de los ratones en el LHA convalidando su utilidad en pruebas de laboratorio.
Los resultados apoyan la hipótesis de igual probabilidad (H0) de la adaptación del ratón albino al LHA en la fase I del estudio, como en la mayoría de los roedores, por su conducta aleatoria (de orientación no preferente) de la dirección horaria o antihoraria (variable intrínseca del instrumento) tanto en la distribución del encadenamiento instrumental (R.4.1) como de la emisión de Rm (R.4.2).
Los resultados apoyan la H1 a la H0 por mayor frecuencia (p = .01) y por mayor Rm (p = .05) a favor del subcaso no CIC (B1-A1), por lo cual fue el efecto principal de la variable independiente en la hipótesis experimental (R.4.4a) donde, por la ejecución del tiempo, se determinó dos modalidades de aprendizaje instrumental: incidental en B1 y condicionado en A1, aprendizaje no discriminativo de la condición reforzamiento (R.4.4b) y, en el caso CIC (B2-A2) se determinó un aprendizaje discriminativo demorado, por el tiempo en B2 a diferencia del tiempo en A2 (R.4.4c y 4.5b).
Podemos afirmar que, en el espacio tridimensional del LHA, dominan las señales egocéntricas conducentes a la meta, por lo que se produjeron un mapa por aprendizaje condicionado y otro por aprendizaje incidental, constituidos en el caso no CIC, lo que ocurrió alternadamente con las respuestas de discriminación demorada en el caso CIC. Por ello, no se puede afirmar la formación de un mapa integrado de los LHA, pues todo aprendizaje supone menor tiempo de ejecución al incrementarse el número de ensayos.



