











 Espanhol (pdf)
Espanhol (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por email Citado por SciELO
Citado por SciELO  Similares em
SciELO
Similares em
SciELO 
 Permalink
Permalink1. INTRODUCCIÓN
El constante aumento de la demanda de energía eléctrica ha llevado a los Sistemas Eléctricos de Potencia (SEP) a operar cerca de sus límites de carga. Por lo tanto, cualquier cambio repentino en la configuración del sistema, variación de carga o cortocircuito puede causar oscilaciones electromecánicas, así como desviaciones de los niveles normales de tensión, lo que puede provocar inestabilidad del sistema [1]. Por lo tanto, la necesidad de un sistema de excitación de alto rendimiento se volvió más adecuada para mantener el estado estacionario y la estabilidad transitoria de los generadores en los sistemas de potencia [2].
Las oscilaciones electromecánicas en los generadores generalmente se amortiguan a través del Estabilizador del sistema de potencia (PSS- Power System Stability), mientras que el control de tensión se realiza a través del Regulador automático de tensión (AVR - Automatic Voltage Regulator). Tanto el AVR como el PSS están ubicados en el sistema de control de excitación del generador síncrono. El AVR, por lo tanto, mantiene el módulo de la tensión del estator dentro de los valores permitidos, mientras que el PSS proporciona una señal adicional a la referencia del AVR para amortiguar las oscilaciones electromecánicas.
Al sintonizar el AVR y el PSS, es muy importante tener en cuenta las variaciones en el punto de funcionamiento del generador. Estos controladores no deben hacer que el sistema se vuelva inestable y también deben mantener un nivel de desempeño cuando ocurre una perturbación. En otras palabras, el AVR y el PSS deben ser lo suficientemente robustos para las variaciones en el sistema. Para que la combinación de AVR y PSS sea robusta, ambos deben sintonizarse de manera coordinada, es decir, no deben determinarse de forma independiente [3].
Se puede utilizar una variedad de técnicas de sintonización para ajustar los parámetros de los controladores, tales como: posicionamiento de polos [4]- [5], método residual [6], sensibilidad de valores propios [7]. Sin embargo, estos métodos convencionales presentan una convergencia lenta, un gran esfuerzo computacional, además de poder converger a soluciones de óptimos locales [8].
Se están utilizando varias técnicas de computación evolutiva para ajustar el AVR y PSS, entre los métodos más conocidos están: Algoritmo genético [9]- [10], Optimización por enjambre de partículas (PSO - Particle Swarm Optimization) [11]- [12], Búsqueda tabú [13]- [14], Evolución diferencial [15], Recocido simulado [16]. Entre estos métodos, el PSO ocupa un lugar destacado, ya que produce una excelente solución en un breve tiempo de cálculo y una buena característica de convergencia [17]. El PSO puede lidiar con problemas imprecisos sin considerar la complejidad y la no linealidad del sistema, lo que hace que su solución funcione bien [18]. Generalmente, PSO es conocido por presentar un concepto simple, fácil de ejecutar y computacionalmente efectivo.
Sin embargo, el uso de la técnica PSO depende mucho de sus parámetros y muchas veces pueden sufrir problemas con óptimos locales, lo que acaba comprometiendo su rendimiento [16]. Este artículo presenta una nueva modificación en la técnica PSO, que se caracteriza por una nueva forma de calcular el factor de inercia en el algoritmo PSO. La modificación propuesta en la técnica de PSO, tiene como objetivo principal proporcionar el escape de los puntos máximos y mínimos locales, permitiendo así que la técnica de sintonización propuesta tenga mayor confiabilidad en el ajuste de los parámetros AVR y PSS.
La técnica de PSO modificada propuesta se aplica para ajustar los parámetros AVR y PSS, con el fin de mejorar la estabilidad transitoria y disminuir las oscilaciones del sistema de potencia. Como forma de verificar el desempeño del método propuesto, se utiliza una función objetivo basada en el tiempo de respuesta del sistema Máquina-Barra Infinita (SMIB - System-Machine Infinity Bus) para una variación en la tensión de referencia. Se compararon los resultados obtenidos con la técnica de ajuste clásica de sintonía con la técnica MPSO propuesta.
Este trabajo está organizado de la siguiente manera: el modelo linealizado para el estudio de estabilidad para pequeñas señales se muestra en la Sección 2. La Sección 3 presenta el diseño de los controladores AVR y PSS. La sección 4 presenta una descripción general de la técnica de optimización del enjambre de partículas y la técnica propuesta. Los resultados y la simulación se revisan en la Sección 5. Finalmente, en la Sección 6 se hacen algunas conclusiones sobre el trabajo.
2. MODELO LINEALIZADO DEL SISTEMA MÁQUINA BARRA INFINITA
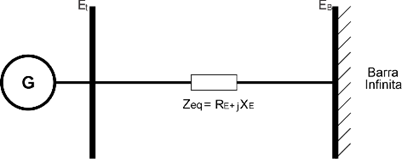
En esta sección se presenta el modelo linealizado de una máquina síncrona conectada a un gran sistema eléctrico a través de una línea de transmisión, válido para el estudio de la estabilidad a pequeñas señales. En la Fig. 1 es posible observar la configuración general de un Sistema Máquina-Barra Infinita (SMIB).
2.1 GENERADOR SÍNCRONO
El generador está representado por su modelo clásico de tercer orden, donde solo se consideran los efectos de los devanados de la armadura y los devanados de campo. Este modelo de tercer orden se usa ampliamente para estudiar la oscilación de baja frecuencia debido a su simplicidad. El conjunto de ecuaciones que se describen a continuación representan este modelo [19]:


Donde, P m y P e son la potencia mecánica y eléctrica del generador en por unidad; H es la constante de inercia de la máquina en segundos; δ es el ángulo del rotor en radianes eléctricos; E f d es la tensión de campo; e’ q tensión interna detrás de la reactancia transitoria en el eje de cuadratura; T ’ d0 es la constante de tiempo transitoria de circuito abierto; x d es la reactancia del eje directo y x ’ d es la reactancia transitoria del eje directo, respectivamente e i d es la corriente del inducido en el eje directo.
2.2 REGULADOR AUTOMÁTICO DE TENSION
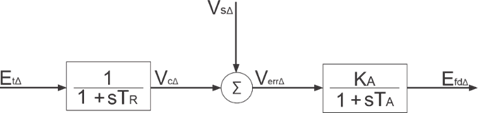
En [20] se describen diferentes tipos de sistemas de excitación. Este trabajo utiliza el modelo de excitación estática simplificada ST1C (sustituto de ST1A), que actúa directamente sobre el devanado de campo de la máquina síncrona y la rectificación de campo se realiza mediante rectificadores estáticos controlados. El modelo utilizado es de primer orden, donde los parámetros K A y T A se refieren a la ganancia y la constante de tiempo del regulador, respectivamente. El diagrama de bloques de este modelo con la presencia del sensor de voltaje del terminal del generador se muestra en la Fig. 3.
2.3 ESTABILIZADOR DEL SISTEMA DE POTENCIA
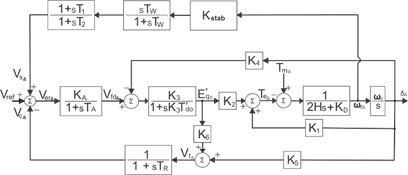
El estabilizador del sistema de potencia se agrega al sistema de excitación para introducir un componente de par de amortiguación en fase con la variación de la señal de velocidad. El PSS consta de tres bloques, el primer bloque representa la ganancia K stab del PSS. El segundo bloque corresponde al filtro de paso alto (washout), donde T W es la constante de tiempo. El tercer bloque está asociado con el circuito de avance de fase necesario para compensar el retardo de fase entre la entrada de excitación y el par eléctrico del generador, las variables T 1 y T 2 corresponden a las constantes de tiempo. En la Fig. 3 es posible ver el diagrama de bloques del estabilizador del sistema de potencia.

La Fig. 4 muestra la representación del diagrama de bloques del modelo linealizado del sistema SMIB con el AVR y el PSS.
3. RESPUESTA DE LOS CONTROLADORES AVR Y PSS
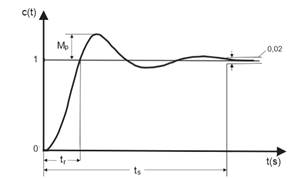
Para el análisis de la eficiencia del proceso de optimización se utilizó el estudio de la respuesta al paso unitario del sistema, que básicamente se refiere al análisis de cuatro parámetros de la respuesta en el tiempo del sistema [21]:
Máximo sobreseñal (M p ): es el valor máximo de pico de la curva de respuesta, medido a partir del valor unitario;
Error de régimen permanente (E ss ): la diferencia entre la señal unitaria y el valor de respuesta en régimen permanente;
Tiempo de acomodación (t S ): es el tiempo requerido para que la curva de respuesta alcance valores en el rango del 2% alrededor de su valor de régimen permanente;
Tiempo de subida (t r ): es el tiempo necesario para que la respuesta pase del 0 al 100% de su valor de estado estable.
En la Fig. 5 es posible verificar algunos de estos parámetros para una respuesta de tiempo al paso unitario del sistema de circuito cerrado
La función objetivo utilizada para analizar el rendimiento de AVR y PSS fue desarrollada en [21] y se basa en cuatro parámetros (M p , E ss , t S y t r ) según (3):

La mejora en el desempeño del sistema ocurre con la maximización de la función objetivo representada por (3). El factor de ponderación (β) actúa como criterio de ponderación entre los parámetros y E ss con los tiempos t S y t r . Para un valor de β igual a 0,7 se alcanza el punto de equilibrio entre los parámetros, mientras que valores de β superiores a 0,7 el algoritmo tiende a priorizar la reducción del exceso y error en estado estacionario. Por otro lado, para valores de β inferiores a 0,7, el algoritmo proporciona un mayor énfasis en reducir los tiempos de subida y el tiempo de acomodación de la señal de respuesta.
4. OPTIMIZACIÓN POR ENJAMBRE DE PARTÍCULAS MODIFICADO
El método propuesto toma como referencia la optimización por enjambre de partículas (más conocido del inglés Particle Swarn Optimization-PSO) [22], al cual se realizó una modificación en el factor de inercia cuyo comportamiento será con decaimiento exponencial y oscilante el cual será llamado Optimización por Enjambre de Partículas Modificado (MPSO), para entender mejor el método propuesto será realizado una breve descripción del método de optimización por enjambre de partículas (PSO).
4.1 OPTIMIZACIÓN POR ENJAMBRE DE PARTÍCULAS CLÁSICO
El método clásico de PSO, es un algoritmo de optimización y búsqueda inspirado en el comportamiento social de las aves en busca de alimento. El algoritmo mantiene un conjunto de soluciones candidatas en el espacio de búsqueda. El algoritmo evalúa iterativamente la idoneidad de la solución mediante la función objetivo que se optimiza. Cada partícula del enjambre representa una solución candidata al problema de optimización. En la primera etapa del algoritmo, selecciona las soluciones candidatas de forma aleatoria dentro del espacio de búsqueda, que está compuesto por todas las soluciones posibles. El algoritmo PSO no tiene conocimiento previo de la función objetivo, por lo que la búsqueda es para determinar qué solución está cerca del máximo local o global. El algoritmo PSO simplemente usa la función objetivo para evaluar sus soluciones candidatas y opera sobre los valores de la función objetivo resultantes.
La partícula indica una posible solución al problema de optimización. La velocidad es la encargada de hacer que la partícula intente ir a una región más prometedora, porque es un vector que siempre está buscando una mejor solución momentáneamente.
En el PSO, la ecuación de velocidad se describe matemáticamente mediante (4). Después de usar la velocidad de la partícula, su posición se actualiza de acuerdo con (5):


Donde:
i : Índice de la partícula;
t : Índice de tiempo discreto;
V i (t) : Velocidad de la partícula en el tiempo t;
: Velocidad de la partícula en el tiempo t+1;
: Posición de la partícula en el tiempo t;
: Posición de la partícula en el tiempo t+1;
: Coeficiente de Inercia (constante);
: Parámetro cognitivo;
: Parámetro social;
rand: Número aleatorio en el intervalo de (0,1) aplicada a la enésima partícula;
Pbest: Mejor posición de la partícula hasta el momento;
Gbest : Mejor posición de la población hasta el momento.
4.2 EL COEFICIENTE DE INERCIA
El coeficiente de inercia juega un papel fundamental en las técnicas que utilizan PSO, en las que incide significativamente en la convergencia y exploración del algoritmo en la búsqueda del óptimo. El peso de la inercia determina la tasa de contribución de la velocidad anterior de una partícula para actualizar su velocidad en el momento actual. El concepto de coeficiente de inercia fue introducido por primera vez en 1998 por Shi y Eberhart [24]. Afirmaron que un gran coeficiente de inercia facilita una búsqueda global, mientras que uno pequeño facilita una búsqueda local.
Para mejorar el rendimiento, actualmente se utilizan varios métodos para calcular w, con el fin de mejorar el rendimiento del algoritmo. En [25], Eberhart y Shi propusieron una estrategia de ponderación de inercia aleatoria y en sus resultados encontraron que esta estrategia aumenta la convergencia en las primeras iteraciones del algoritmo. En [25] se propone una estrategia de decremento lineal. Los resultados obtenidos muestran que al variar el w de 0,9 a 0,4 se obtienen excelentes resultados en cuanto a la eficiencia y rendimiento del algoritmo.
En [26] se presenta dos estrategias para variar el coeficiente de inercia, utilizando un exponencial natural, basado en la misma idea de decremento lineal. Experimentalmente, estas dos estrategias obtuvieron resultados más rápido que por disminución lineal durante las etapas iniciales del proceso de búsqueda y proporcionan mejores resultados para la mayoría de los problemas de optimización continua.
4.3 PROPUESTA DE MODIFICACIÓN DEL COEFICIENTE DE INERCIA
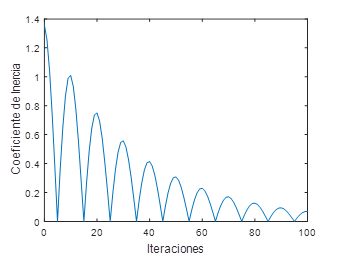
La propuesta de modificación del coeficiente de inercia funciona de manera que la velocidad aumente y disminuya de manera oscilante a la medida que las iteraciones aumentan y al mismo tiempo las amplitudes de las oscilaciones también disminuyen como puede observarse en la fig. 6. En pruebas iniciales se encontró que, como el coeficiente de inercia w tiene un comportamiento oscilante con decremento exponencial ayuda a las partículas a explorar grandes áreas del espacio de búsqueda y en la medida que el número de iteraciones aumenta, la amplitud de las oscilaciones disminuye exponencialmente forzando a una búsqueda más condensada al final de las iteraciones. Este criterio se aplicará en la sección 4.4 siguiente.
4.4 ALGORITMO DEL MÉTODO PROPUESTO DEL PSO MODIFICADO
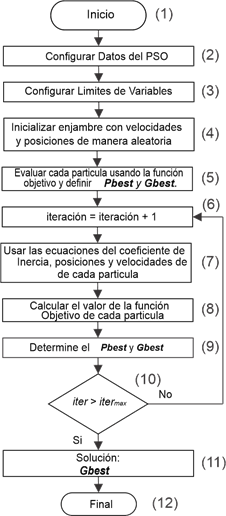
El algoritmo propuesto presenta una nueva forma de calcular el coeficiente de inercia, donde se comportará de forma oscilatoria con decremento exponencial (ver Fig. 7) a lo largo del proceso de optimización, basado en una función con comportamiento de exploración amplia al inicio de las iteraciones y exploración concentrada en algunas áreas del espacio de búsqueda al final de las iteraciones. La función que permite este comportamiento del coeficiente de inercia se puede calcular mediante (6).



El factor de inercia propuesto inicialmente hace que las partículas entren en el proceso de ganancia (dispersión de partículas) durante las primeras iteraciones y pérdida de energía (establecimiento de partículas alrededor de un punto mínimo o máximo local) en la parte final de las iteraciones, de esta manera se explora mejor el espacio de búsqueda de las variables.
Para aplicar el algoritmo del método propuesto, se deben seguir los siguientes pasos:
Inicio;
Determinar el número de partículas en la población (N) y el número máximo de iteraciones iter max y los valores de los parámetros de aprendizaje (Φ1 e Φ2) de la ecuación (4);
Definir los límites máximo y mínimo de las variables a determinar;
Inicialmente se inicializa aleatoriamente la posición (xi) y la velocidad (vi) de las partículas para cada variable, respetando los límites establecidos para (xi) y (vi);
Al Inicio, p best i será igual al valor generado aleatoriamente para cada partícula, mientras que g best será el mejor valor entre las partículas. Recordando que cada variable tiene su p best i y g best es del enjambre;
iter = iter + 1;
Actualiza el coeficiente de inercia w usando las ecuaciones (4) a (6). La velocidad y la posición también se calculan utilizando las ecuaciones (4) y (5), respectivamente;
Calcula el valor de la función objetivo para cada partícula (FO i );
Defina los nuevos p best i y g best
Si el valor de FO i > p best i
FO i = p best i
Si el valor de p best i > g best
g best = p best i
Compruebe los criterios de parada. Si está satisfecho, vaya al paso 11. De lo contrario, vuelva al paso 6;
Solución del algoritmo, g best ;
Final.
El diagrama de flujo completo del algoritmo se muestra en la Fig. 7.
5. SIMULACIÓN Y RESULTADOS
El sistema considerado para el estudio es el modelo SMIB presentado en la Fig. 4, cuya implementación se realizó a través del entorno de simulación Simulink del MATLAB®.
Para la aplicación del algoritmo MPSO propuesto en el ajuste simultáneo del AVR y PSS, es necesario inicialmente definir el tamaño de partículas a utilizar. Este trabajo tiene como objetivo determinar el valor óptimo de los parámetros de ganancia (K A ) del AVR, la ganancia (K stab ) y las constantes de tiempo T 1 y T 2 del PSS. Teniendo esto en cuenta, una partícula del enjambre de PSO utilizada para determinar los parámetros ideales de los controladores, tendrá su representación según (7):

Con respecto a las constantes T A del AVR y T W del PSS, pueden variar entre 0.01-0.1s y 1-10s, respectivamente. En este trabajo, se seleccionó un valor de 0.02s para T A y 1s para T W . La TABLA I muestra los límites superior e inferior de los parámetros a ser determinados inicialmente por el MPSO Propuesto. Los datos del sistema, así como los límites de los parámetros, están disponibles en [25].
| Parámetros | K A (p.u.) | K stab (p.u.) | T 1 (s) | T 2 (s) |
| Límite superior | 400 | 2 | 3 | 0,5 |
| Límite inferior | 1 | 0,1 | 1 | 0,0001 |
Para el sistema en estudio se utilizó el algoritmo descrito en la fig. 7 y se adoptaron los siguientes valores de simulación para los parámetros de PSO Modificados, como se muestra en la TABLA II.
| Parámetros | Valor |
| Número de interacciones | 100 |
| Número de partículas (N) | 100 |
| Φ1 Y Φ2 | 0,5 e 1,5 |
| w max e w min | 0,1 e 1,1 |
Para verificar el desempeño del algoritmo propuesto, se aplicó una señal de escalón unitario a la tensión de referencia (V ref ) del generador y se observó la respuesta en el tiempo de la tensión terminal y el ángulo del rotor de este generador síncrono.
Con la finalidad de analizar la eficiencia del uso de la técnica MPSO propuesta, se realizaron 50 simulaciones para verificar la convergencia del método propuesto. En TABLA III es posible observar una comparación entre PSO clásico y el método propuesto MPSO, en relación a los indicadores de la tasa de convergencia entre las simulaciones, obtenidos a través de la respuesta temporal de la tensión terminal del generador.
| Método | Función Objetivo | |||
| Mayor | Menor | Promedio | Desviación Estándar | |
| PSO | 14,3825 | 10,0872 | 13,6426 | 1,2686 |
| PSO-M | 14,3836 | 13,9932 | 14,1967 | 0,2133 |
Como se observa en los resultados de la TABLA III, el método PSO presenta problemas de convergencia entre sus simulaciones, pues sus parámetros acaban estancados en puntos de óptimos locales. Si bien la técnica propuesta de PSO-M, mejoró la confiabilidad en el ajuste de los parámetros, esto se puede verificar a partir de su valor promedio, el cual está muy cerca del mejor valor determinado y también presenta un valor de desviación estándar bajo.
En la TABLA IV es posible verificar una comparación entre los parámetros obtenidos a través del PSO-M con los valores obtenidos utilizando la técnica de sintonización clásica desarrollada en [29] y se basa en aproximaciones de ecuaciones que describen el sistema.
| Método | K A (p.u.) | K stab (p.u.) | T 1 (s) | T 2 (s) | Función Objetivo |
| Técnica Clásica | 197,2500 | 0,2 | 0,7261 | 0,0051 | 3,1215 |
| PSO-M | 306,3343 | 0,1 | 1,1346 | 0,0115 | 14,3835 |
La Fig. 8 muestra, respectivamente, el comportamiento dinámico de la tensión terminal y el ángulo del rotor para una entrada al paso unitario en la tensión de referencia con los valores de los parámetros determinados en la TABLA IV para cada uno de los métodos.

Fig. 8 Comportamiento de la Tensión Terminal y del Angulo del Rotor para una entrada de paso unitario. (a) Tensión Terminal, (b) Angulo del Rotor
Observando la Fig. 8, se puede concluir que el ajuste del AVR y PSS realizado por el PSO-M obtuvo un mejor rendimiento en comparación con el método clásico, permitiendo una reducción de la diferencia entre los tiempos de acomodación y el tiempo de subida, manteniendo el error en estado estacionario y la máxima pendiente dentro de los límites deseados.
Para un mejor análisis en la TABLA V, hay una comparación entre los indicadores principales de la respuesta temporal para sintonizar los parámetros AVR y PSS para la curva de tensión terminal y el ángulo del rotor que se muestra en la Fig. 8.
CONCLUSIONES
En este trabajo, se presentó la sintonización simultánea del AVR y PSS para un SMIB utilizando la propuesta MPSO. La modificación en el factor de inercia en la técnica PSO brindó un mejor desempeño en comparación con la técnica de sintonización clásica, mostrando una reducción en la diferencia entre los tiempos de acomodación y subida, manteniendo la sobreseñal y el error de régimen permanente dentro de los límites deseados. En cuanto a la eficiencia del algoritmo se pudo observar que logró mejorar la confiabilidad del método clásico PSO, tiene una buena tasa de convergencia, la cual se puede notar por el pequeño valor de la desviación estándar y el valor del promedio de las simulaciones que se acerca al mayor valor determinado. Teniendo esto en cuenta, la modificación del factor de inercia en el PSO propuesto cumplió con los objetivos, proporcionando una buena convergencia entre las simulaciones y una mejor respuesta para el ajuste de los parámetros AVR y PSS.

