











 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO  uBio
uBio 
 Permalink
PermalinkINTRODUCCIÓN
La escasez del recurso hídrico ha generado la necesidad de ahorro y uso eficiente del agua. Los sistemas inteligentes de gestión de riego, basados en el Internet de las cosas, pueden ayudar a lograr una utilización óptima de los recursos hídricos en la agricultura (Goap, Sharma, Shukla, & Rama Krishna, 2018). Para enfrentar la mayor demanda de agua, se hace latente la necesidad de desarrollar prácticas de gestión eficiente del recurso hídrico (Canales-Ide, Zubelzu, & Rodríguez-Sinobas, 2019; Ingale & Kasat, 2012; Mayhua López et al., 2015). La automatización de los sistemas de riego, usando los microcontroladores Arduino, reduce el consumo del agua, ahorra tiempo en la operación (Abhishek Kumar & Magesh, 2017; Ojha, Mohite, Kathole, & Tarware, 2016), disminuyendo los costos en la implementación (Shakoor, Khan Mehmood, Ahmad, & Wajid, 2016); reduce el esfuerzo humano en el manejo del sistema y el monitoreo de las plantas (Al-Omary, AlSabbagh, & Al-Rizzo, 2018; Tt, Saji, Dubey, & Saravanakumar, 2017); además, permite el uso eficiente de la energía (Khandoba & Jyoti, 2017; Reddy & Rao, 2016). Según Hong y Hsieh (2016), un sistema de invernadero con riego por goteo automatizado y la programación de riego en base a la humedad del suelo, ahorra el 90% en el uso de energía y agua.
La solución económica para la automatización de los sistemas de riego, es el uso de los microcontroladores Arduino (Khandoba & Jyoti, 2017; Abhishek Kumar & Magesh, 2017; Ortiz, Litvin, & Salas Fernandez, 2018; Rivas Sánchez, Moreno Pérez, & Roldán Cañas, 2019), debido al bajo costo de las placas, los actuadores y los sensores, en comparación con otros equipos (Tt et al., 2017). El hardware y software de la plataforma Arduino son de libre acceso para el desarrollo interactivo de objetos autónomos y vinculados a un computador utilizando el lenguaje de programación C++ (“Arduino,” 2019).
La calibración del sensor de humedad de suelo, es útil porque permite un manejo óptimo del riego (González Teruel et al., 2019). Según las investigaciones, se reporta que para obtener la precisión en las mediciones para la programación de riego, el sensor de humedad requiere calibración específica en el suelo (Datta et al., 2018; Shakoor et al., 2016; Sui, 2016).
Kim et al. (2006) desarrolló un sistema de riego “Wireless sensing Network “(WSN), que colecta información de suelo y clima. Hong y Hsieh (2016) usaron Bluetooth para transmitir información como temperatura, humedad relativa, radiación solar y humedad de suelo, en un invernadero.
El objetivo principal de la investigación fue la calibración, validación y automatización de un sistema de riego por goteo subterráneo para césped, basado en la placa del microcontrolador Arduino.
MATERIALES Y MÉTODOS
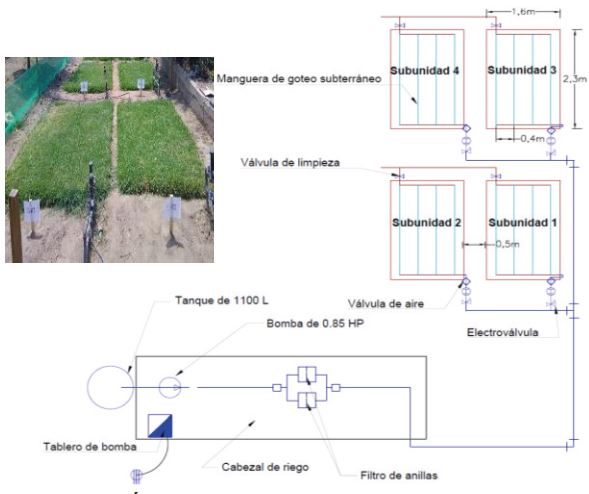
Se desarrolló el trabajo en una parcela experimental de la Universidad Nacional Agraria la Molina (UNALM) durante el año 2018; se utilizó el sistema de riego por goteo subterráneo (RGS), constituido por: un reservorio de agua de 1100 litros, un sistema de bombeo de 0,85 HP de potencia, un sistema de filtrado, válvulas volumétricas, válvulas de aire y 4 sub unidades con mangueras integrales, comandadas por electroválvulas (Figura 1).
Selección del microcontrolador, sensores, relé y módulo de comunicación
Los criterios fueron los siguientes:
Un microcontrolador con un alto número de pines analógicos y digitales para vincular un mayor número de sensores, relés y módulo de comunicación.
Sensores de caudal, presión, altura de agua y humedad de suelo, que tengan compatibilidad con el microcontrolador seleccionado. Los rangos de trabajo de las variables de cada sensor seleccionado, estuvieron en función de los parámetros de operación del sistema de riego.
Relés adecuados que permitan encender o apagar los actuadores como las electroválvulas y electrobomba.
Módulo de comunicación compatible con el microcontrolador.
Los componentes de la automatización mencionados deben ser económicos y accesibles en el mercado.
Calibración y validación de los sensores
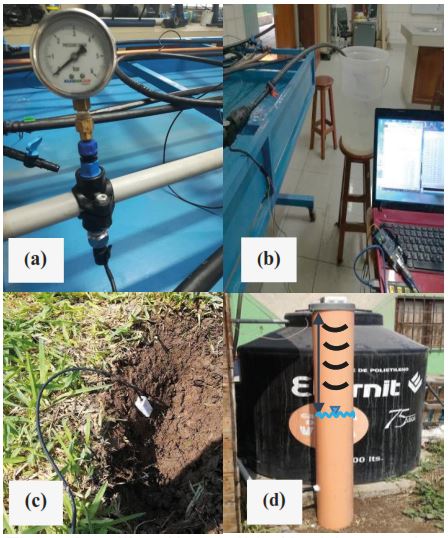
Se realizaron en el banco de prueba y en la parcela experimental, mediante los siguientes procedimientos (Figura 2):
Desarrollo de códigos de programación para la lectura de la señal analógica en los sensores de presión y humedad de suelo; y señal digital en los sensores de caudal y nivel de altura.
Visualización gráfica entre las señales eléctricas y los parámetros físicos de los sensores.
Determinación de las ecuaciones de ajuste y/o factor de conversión.
Programación e implementación de las ecuaciones de ajuste y/o factor de conversión en el programa de Arduino denominado “sketch”.
Validación de los sensores en el sistema de riego.
Transductor de presión
En el banco de prueba, (Figura 2a), se instaló un collarín de polietileno de doble entrada en la tubería de PVC de 1”, en el primer orificio se instaló un punto de prueba de presión para insertar el manómetro y en el segundo, un transductor de presión. Las presiones fueron medidas con un intervalo de un metro de columna de agua (m.c.a.), en el rango de 5 a 20 m.c.a. Las mediciones fueron recolectadas en bits a través del transductor, finalmente se determinaron las ecuaciones de ajuste para relacionar los bits y la presión en m.c.a. Se validaron las mediciones de los transductores instalados, con la lectura del manómetro en el sistema de riego.
Sensor de caudal
En una tubería de PVC de 1”, (Figura 2b), se instaló el sensor de caudal para registrar la cantidad de pulsos que emitía el sensor y relacionarla con el volumen. Se determinó el factor de conversión que relaciona el número de pulsos y volumen.
El factor de corrección se calculó con la metodología propuesta por (Suresh, Balaji, Anto, & Jenith, 2014).
Se validaron las mediciones de los sensores de caudal instalados, con la lectura de la válvula volumétrica en el sistema de riego.
Sensor de humedad de suelo
Los sensores GS1® (Decagon Devices, USA), tienen una función de calibración que relacionan la humedad de suelo con la permitividad aparente; sin embargo, para mejorar la precisión, se recomienda realizar una calibración específica del suelo (González Teruel et al., 2019). Para la calibración se relacionó la humedad de suelo y los bits del sensor (Figura 2c).
Se validaron las mediciones del sensor de humedad de suelo instalado, con el método gravimétrico en el sistema de riego.
Sensor de nivel de altura por ultrasonido
El sensor emite una señal de ultrasonido al espejo de agua, el cual permite obtener la distancia en centímetros, que fue verificada utilizando una regla milimétrica (Montoya, Obando, Morales, & Vargas, 2017) (Figura 2d).
Integración de los códigos de programación
El proceso de integración consistió en unir los códigos de programación desarrollados para cada sensor y actuador, en un solo sketch del software de Entorno de Desarrollo Integrado (IDE) del Arduino, para interactuar con el aplicativo.
Comunicación y desarrollo del aplicativo móvil
Se utilizó el software App Inventor® para el desarrollo del aplicativo con el sistema operativo Android®. El software se compone de dos secciones: el “Modulo Web”, donde se desarrolló un conjunto de vistas de pantalla del aplicativo y el “Editor de Bloques”, en la cual se crearon los códigos para el funcionamiento. El lenguaje de programación del editor de bloques, es Java®. El software es gratuito y se puede descargar de la Web (Almaraz, Maz Machado, & López Esteban, 2015).
Control y monitoreo
Para verificar el funcionamiento, se realizaron pruebas al sistema de riego automatizado durante un mes; en este periodo se calculó el tiempo de riego en base a la información del sensor de humedad, para el inicio automático del riego. Durante el riego se monitoreó el caudal y presión en el cabezal y las subunidades de riego, el nivel de agua del reservorio, y el valor de humedad antes y después del riego; además se controló la bomba y las electroválvulas.
RESULTADOS
Selección de microcontrolador, sensores, módulo de comunicación y actuadores
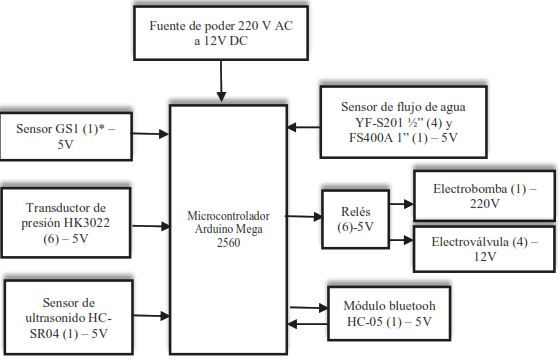
En la Figura 3 se muestran los dispositivos vinculados al microcontrolador. La fuente de poder fue de 220 V y se usaron transformadores para obtener un voltaje de 12 V y un amperaje de 1,5 Amperios (A), para el funcionamiento del microcontrolador y las electroválvulas. Los dispositivos vinculados al microcontrolador suman un total de corriente de consumo de 0,40 A.
Calibración y validación de sensores
Transductor de presión
La ecuación de la calibración de los transductores de presión, que relaciona los bits y la presión del manómetro (Pm), fue la siguiente Pm = 0,128 bits - 12,3 con un coeficiente de determinación (R2) de 0,99.
Se validó la ecuación de calibración de los transductores (X) con los valores de presión del manómetro (Y) obtenidos en el campo. La ecuación fue lineal: Y = 1,005 X + 0,04 y el R2 fue 0,99. Se calcularon los porcentajes de error para las mediciones de presión de 20, 15 y 10 m.c.a, que oscilan entre el 1% y el 2,85%.
Sensor de humedad de suelo
La curva de calibración entre la humedad de suelo (hbss) y los bits del sensor, fue lineal, hbss = 0,054 bits + 7,34; y el R2 fue 0,95.
La curva de validación del sensor de humedad resultó lineal, donde la humedad del suelo registrada por el sensor es “Y” y la humedad obtenida por el método gravimétrico es “X” Y = 0,926 X + 3,823 y el R2 fue de 0,99.
Sensor de caudal
El sensor utilizado en el cabezal de riego fue de modelo FS400 de 1” y los sensores instalados en las subunidades fueron el modelo YF-201 de ½”; por este motivo el factor de corrección “K” difiere; para el diámetro de 1” tuvo un valor de 0,72 y para el diámetro ½” tuvo un valor de 1,10, considerando un tiempo en la habilitación de interrupciones de 170 milisegundos.
En la validación se realizaron dos pruebas por cada sensor; la primera al encender el sistema, considerando la existencia de aire en la red de tuberías, el error fue de 4,27% y la segunda, cuando la tubería estuvo llena de agua y sin bolsas de aire, el error fue de 0,39%, se utilizó la subunidad 4.
Sensor de nivel de altura por ultrasonido
Para la calibración se relacionó la distancia medida por el sensor y los bits. Se calculó el R2 igual a 0,99.
Programación del microcontrolador y diseño electrónico
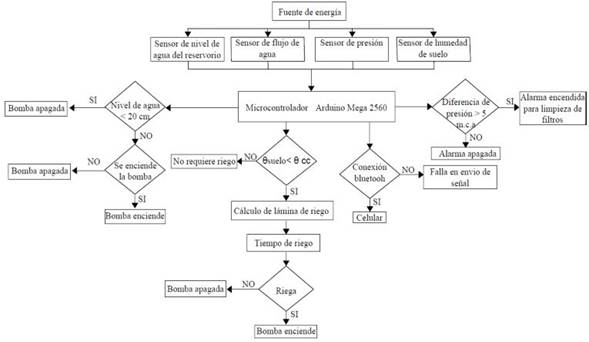
En la Figura 4, se muestra el diagrama de flujo de procesos, los sensores midieron las variables de presión, caudal, humedad de suelo y nivel de altura de agua de la cisterna; estas se definen como variables de entrada y/o salida para la programación. Por seguridad los relés se inicializan en estado apagado (OFF), debido a la disponibilidad de corriente.
Las señales eléctricas de los sensores fueron visualizadas en el monitor serial y luego transformadas en las variables físicas que fueron calibradas y representadas por ecuaciones.
Para el encendido y apagado de la bomba y electroválvulas, se añadieron sentencias condicionales secuenciales de la siguiente manera: Si el monitor serial recibe la señal de encender bomba (ON), si el monitor serial recibe señal de apagar bomba (OFF). Para abrir y cerrar electroválvulas se utilizaron también sentencias condicionales.
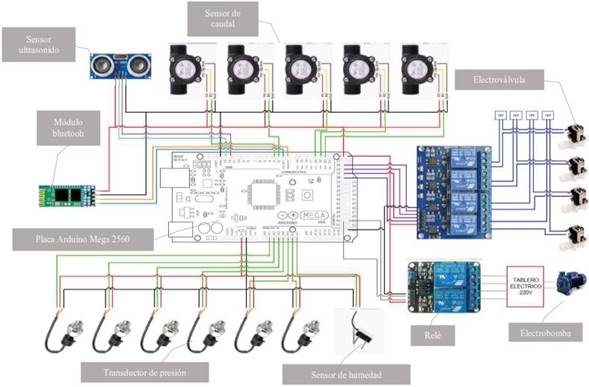
En la Figura 5 se presenta el diseño electrónico de los sensores, actuadores, relés, electroválvulas, módulo bluetooh y bomba con sus respectivos pines de la placa Arduino Mega 2560.
En el modelo Arduino Mega 2560, los sensores de flujo fueron conectados a los siguientes pines 2, 3, 18, 19, 20 y 21, porque tienen la función de habilitar interrupciones y permiten la medición del número de pulsos.
Interfaces, control y monitoreo
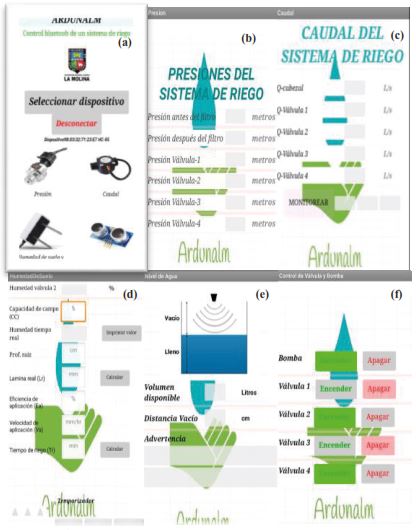
El aplicativo desarrollado permite al usuario el control de la electrobomba, electroválvulas y el monitoreo de la presión, caudal, humedad de suelo y nivel de agua en el reservorio.
En la Figura 6a, se observa la pantalla principal del aplicativo, el usuario se vincula al módulo bluetooh para acceder a las otras interfaces. En las figuras 6b, 6c,6d y 6e, se presentan las interfaces correspondientes al monitoreo de: presiones y caudales en el cabezal y subunidades de riego; humedad de suelo que permite el cálculo de tiempo de riego; y nivel y volumen de agua en el reservorio.
DISCUSIÓN
Se realizó la calibración de los sensores obteniendo valores de R2 superiores a 0.90 en todas las ecuaciones, estos indican la alta relación directa entre la señal eléctrica enviada por el sensor y la variable física, como la presión, caudal, altura de agua y humedad de suelo. Según otras investigaciones en las que se realizaron calibraciones de sensores de humedad de suelo, se obtuvieron valores de R2 mayores a 0.80 (Adeyemi, Norton, Grove, & Peets, 2016; Datta et al., 2018; Jiang, Lv, Deng, & Zhai, 2017). Según Shadadpuri Goplani (2018), calibró el sensor ultrasonido HC-SR0, donde se reportó que el R2 fue igual a 1, esto corrobora la buena precisión de este sensor.
En la validación del sensor de humedad de suelo se obtuvo el porcentaje de error de 2% lo cual está dentro de límites permisibles para el monitoreo de humedad de suelo.
En la validación del transductor de presión, el porcentaje de error fue entre 1% y 2,85%, lo cual es aceptable; además, el monitoreo de la presión permitió determinar el momento de la limpieza de los filtros y garantizó la presión mínima en la subunidad de riego.
El monitoreo del caudal en tiempo real, es necesario para detectar posibles fugas de agua u obstrucción de los goteros. El sensor de flujo de agua de efecto Hall, en comparación con otros tipos de medidores, ofrece mayor precisión y es económico (Sood, Kaur, & Lenka, 2013).
La utilidad del sensor de ultrasonido es evitar que la electrobomba trabaje sin agua; asimismo, permite controlar los niveles mínimos, máximos y el volumen de agua disponible en el reservorio (Ankit Kumar, Chanchal, Kumar, Kumar, & Mansoori, 2016), lo que permitió conocer la disponibilidad de agua en el RGS para su correcta operación.
La capacidad de pines de entrada digitales (54) y analógicas (16) del microcontrolador Arduino Mega 2560, permite utilizar mayor número y tipos de sensores, además posee un software de libre acceso e intuitivo para la programación. La automatización tuvo un costo de 669 dólares.
El aplicativo desarrollado llamado “Ardunalm” tiene la finalidad de recibir y enviar información mediante el módulo de comunicación bluetooh HC-05, facilitando la gestión del riego para el ahorro del agua.
CONCLUSIONES
El microcontrolador Arduino Mega 2560 ofrece compatibilidad con los sensores, actuadores y módulo de comunicación utilizados. Los sensores fueron calibrados obteniendo los R2entre 0,95 - 0,99, indicando una alta correlación entre la variable física y eléctrica; asimismo, el valor de R2 igual a 0,99, para la validación de los transductores de presión, sensor de humedad y sensor de nivel de altura; y los factores de conversión promedio para el sensor de caudal de 1” y ½”, fueron 0,72 y 1,1 respectivamente.
Se desarrollaron los códigos de programación que integraron a todos los componentes utilizados. El aplicativo móvil denominado “Ardunalm” permite interactuar con todos los dispositivos a través de su integración en un sketch Arduino utilizando un módulo Bluetooh, de esta manera es posible controlar desde el aplicativo móvil, el accionamiento de la electrobomba y electroválvulas, además de visualizar los valores monitoreados por los sensores instalados.
Los microcontroladores y sensores de bajo costo, disponibles en el mercado son accesibles para los pequeños productores urbanos y rurales. El uso de estos dispositivos electrónicos requiere la calibración y validación con equipos testeados y métodos directos probados que servirán como estandares de referencia. La calibración y validación de los sensores permitió el desarrollo de la automatización integrada, confiable y segura para el monitoreo y control del sistema de riego, además es posible lograr el ahorro del recurso hídrico, el incremento de la eficiencia de riego; y la mejora del rendimiento y calidad del cultivo.
Se recomienda desarrollar normas técnicas peruanas que incluyan protocolos para la calibración y validación de sensores utilizados en los sistemas de riego como: sensor de presión, caudal, nivel de altura y humedad.

