










Servicios Personalizados
Revista

Articulo
 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO
Links relacionados
-
 Similares en
SciELO
Similares en
SciELO
Compartir

 Permalink
PermalinkRevista de Gastroenterología del Perú
versión impresa ISSN 1022-5129
Rev. gastroenterol. Perú v.23 n.1 Lima ene./mar. 2003
CONTRIBUCIÓN ESPECIAL
Sistemas Quirúrgicos Robóticos y Telebóticos para cirugía abdominal
Alfredo Córdova Dupeyrat1 & Garth H. Ballantyne2
1 Hospital Nacional Arzobispo Loayza. Facultad de Medicina Humana USMP. Lima, Perú
2 Minimally Invasive & Telerobotic Surgery Institute. Hackensack University Medical Center. Hackensack, New Jersey, USA
RESUMEN
La Administración Federal de Drogas de los Estados Unidos (FDA), ha aprobado cuatro sistemas robóticos quirúrgicos para su uso en operaciones de laparoscopía clínica. El propósito del presente artículo es describir, estos cuatro sistemas robóticos quirúrgicos. En la cirugía robótica laparoscópica, AESOP y Endoassist reemplazan al camarógrafo y proveen una plataforma estable al telescopio de video. AESOP es controlado mediante comandos de voz por el cirujano, mientras Endoassist responde a los movimientos de una luz infrarroja adherida a la cabeza de este. Durante las operaciones laparoscópicas telerobóticas, el cirujano se ubica sentado frente a una consola de computadora que se encuentra distante al paciente. El cirujano observa un campo operatorio virtual en tres dimensiones y realiza la operación controlando dos brazos telerobóticos, los cuales sostienen los instrumentos quirúrgicos. Estos instrumentos simulan los movimientos de las manos del cirujano, presentando seis grados de libertad y dos de rotación axial. La combinación de imágenes tridimensionales y movimientos semejantes a los manuales de los instrumentos quirúrgicos facilita la realización de procedimientos laparoscópicos complejos. La FDA autorizó al sistema de cirugía telerobótica Da Vinci, a actuar como cirujano operador en Junio del 2000, mientras que en el caso de Zeus únicamente lo autorizó a desempeñarse como asistente quirúrgico durante operaciones laparoscópicas recién en octubre del 2001. Como resultado, cirujanos han reportado gran experiencia clínica con Da Vinci. La cirugía telerobótica laparoscópica abdominal es factible y sus resultados iniciales son similares a los de la cirugía laparoscópica tradicional. Los sistemas quirúrgicos robóticos y telerobóticos superan algunas de las limitaciones inherentes de la cirugía laparoscópica tradicional y podrían incrementar el número de cirujanos que realicen operaciones complejas de laparoscopía en el futuro.
PALABRAS CLAVE: Robótica; Cirugía Robótica; Cirugía Telerobótica; Telemedicina.
SUMMARY
The United States Food and Drug Administration (FDA) has approved four robotic surgical systems to be used in operations of clinical laparoscopy. The purpose of this article is to describe these four robotic surgical systems. In robotic laparoscopy surgery, AESOP and Endoassist replace the cameraman and provide a stable platform for the video telescope. AESOP is controlled by the surgeons voice commands, whereas Endoassist responds to the movements of an infrared light adhered to the surgeons head.
During the telerobotic laparoscopic surgeries, the physician is seated in front of a computer console that is at a distance from the patient. The surgeon observes a virtual three-dimensional operating area and carries out the operation by controlling two tele-robotic arms, both of which hold the surgical instruments. These telerobotic arms simulate the movements of the surgeons hands, with six degrees of freedom and two degrees of axial rotation. By combining the three-dimensional images and the movements which are similar to the manual movements of the surgical instruments, The complex laparoscopic procedures are facilitated. In June 2000, the tele-robotic surgical system Da Vinci was authorized by the FDA to act as an operating surgeon, but in October 2001, in the case of Zeus, it was only authorized to act as an assistant surgeon during laparoscopies,. Consequently, surgeons have reported great clinical experiences with Da Vinci. Tele-robotic, laparoscopic abdominal surgery is feasible, and its initial results are similar to those obtained from traditional laparoscopic surgery. Therefore, the tele-robotic and robotic surgical systems overcome some of the limitations inherent in traditional laparoscopic surgeries and they could increase the number of surgeons who could perform complex laparoscopies in the future.
KEY WORDS: Robots; Robotic, Telerobotic; Robotic Surgery; Telerobotic Surgery; Tele-presence; Tele-medicine.
INTRODUCCIÓN
La Administración Federal de Drogas de los Estados Unidos (FDA), ha aprobado cuatro sistemas robóticos quirúrgicos para uso clínico durante operaciones abdominales dentro del territorio estadounidense. Estos son:
Automated Endoscopic System for Optimal Positioning (AESOP) (Computer Motion Incorporated, Santa Barbara, California), Endoassist (Armstrong Health Limited, High Wycombe, Reino Unido), Da Vinci (Intuitive Surgical, Mountain View, California) y Zeus (Computer Motion Incorporated, Santa Barbara, California). Durante la cirugía, el sistema robótico quirúrgico desempeña las funciones de uno de los asistentes quirúrgicos. El cirujano permanece a lado de la mesa quirúrgica y opera directamente sobre el paciente utilizando instrumentos tradicionales de laparoscopía. AESOP y Endoassist son sistemas quirúrgicos robóticos que reemplazan al camarógrafo y sostienen el telescopio de video durante las cirugías laparoscópicas. En contraste, durante la cirugía telerrobótica, el telerobot sostiene la cámara y además realiza la operación mediante dos o más brazos robóticos. El cirujano se localiza sentado a distancia del paciente y controla los movimientos de los brazos e instrumentos quirúrgicos telerrobóticos a través de la interfase de una computadora.
En el presente artículo, presentaremos el desarrollo histórico de la cirugía robótica y telerobótica. Así mismo, repasaremos el actual estado de estos sistemas quirúrgicos durante su uso en operaciones abdominales. Además, describiremos cada uno de los sistemas quirúrgicos robóticos y telerobóticos aprobados por la FDA destacando sus características particulares, diferencias y limitaciones.
CIRUGÍA ROBÓTICA
El primer robot clínicamente exitoso, llamado Robodoc, fue introducido en un reemplazo total de cadera.1 2 Cirujanos generales inicialmente pusieron su atención en reemplazar al camarógrafo con un robot controlado por un cirujano. En 1993, en la Universidad de California en Davis, Moran describió un sujetador de cámara controlado pneumáticamente y regulado pasivamente en forma electrónica.3 Buess y colegas en Tubingen, Alemania desarrollaron un prototipo de camarógrafo robótico considerado el FIPS Endoarm.4 Este brazo robótico era controlado a distancia mediante un anillo para el dedo que se encontraba adherido a uno de los instrumentos del cirujano. Este se movilizaba presentando cuatro grados de libertad, mientras conservaba un punto fijo de moción forzada. AESOP es el primer sistema quirúrgico robótico en ser usado rutinariamente en cirugía laparoscópica.
AESOP
El primer robot en ser aprobado por la FDA para uso clínico en abdomen es AESOP, el cual es fabricado por Computer Motion Incorporated de Santa Barbara, CA. La aprobación de la FDA fue otorgada en 1994. Computer Motion fue inicialmente fundada con una concesión para investigación de la NASA, con el fin de desarrollar un brazo robótico para el programa espacial de los Estados Unidos. Posteriormente, este brazo fue modificado para sostener un laparoscopio y reemplazar al camarógrafo laparoscópico. Una computadora rastrea la posición de la punta del telescopio. Cuando AESOP recién es introducido, el cirujano controla el brazo robótico ya sea manualmente o a distancia a través de un pedal o un control manual. 5 6 Generaciones más recientes de AESOP obedecen a comandos de voz.7 8 El robot se sujeta a un lado de la mesa quirúrgica. Este es liviano y puede ser levantado con facilidad. Sin embargo, se provee un coche que facilita el transporte del robot. Cuenta con una serie de adaptadores que pueden sujetar cualquier laparoscopio rígido. Esto permite al cirujano variar entre telescopios de 3 mm, 5mm, y 10 mm, así como entre varios telescopios angulados.
El cirujano cuenta con un micrófono y controla los movimientos del telescopio con comandos específicos de voz al robot (FIGURA 1). Él graba estos comandos de voz en una tarjeta de sonido. Cada cirujano requiere una tarjeta de sonido personalizada. El algoritmo de la computadora que identifica el patrón de voz propio del cirujano es propiedad y esta patentado por Computer Motion. El cirujano verbalmente puede programar tres posiciones para el telescopio y posteriormente ordenar al robot a regresar a estas posiciones pre-establecidas. Esto facilita maniobras repetitivas como suturas. El cirujano verbalmente retira el telescopio, por ejemplo, para ofrecer una vista panorámica cuando se introduce la sutura. El zoom de la cámara se acerca a una segunda posición pre-establecida mientras se inserta la sutura y luego se mueve más hacia adentro para una vista cercana cuando el nudo es amarrado y ajustado. Tres comandos de voz simples regresan el telescopio a cada una de estas tres posiciones.
AESOP cuenta con una serie de sistemas de libre-falla que protegen al paciente. Al inicio de la cirugía, el cirujano fija un margen inferior limite para el brazo robótico de AESOP. Esto previene al brazo robótico de herir al paciente durante la operación. Inclusive, pequeñas presiones sobre la punta del telescopio apartan la acopladura magnética que une el telescopio a AESOP. Esto evita comandos inadvertidos por parte del cirujano a conducir el telescopio a través de estructuras anatómicas, como el hígado.
AESOP provee una plataforma estable para la cámara. El robot no es distraído por llamadas telefónicas y no se aburre con la operación. Mas aun, el brazo de AESOP no se cansa. Como resultado, la imagen de video no tiembla y no tiende a perderse fuera del campo operatorio. Por ejemplo, grupos en Antwerp, Bélgica y Catania, Italia han hallado a AESOP de gran ayuda en la realización de adrenalectomías laparoscópicas.9 10 Ambos grupos hallaron que una plataforma estable para la cámara proporciona una imagen de video estable y constante la cual facilita la operación. Además, AESOP recuerda donde se ubica el horizonte y permanece orientado adecuadamente, mientras se desplaza a distintas locaciones. Tanto la imagen estable así como la relación constante con el horizonte, minimizan la enfermedad del movimiento en el equipo operatorio.
AESOP facilita la realización de procedimientos laparoscópicos de cirugía general de cirujanos solitarios. Geis y colegas emplearon a AESOP para realizar 24 reparaciones de hernia inguinal, colecistectomías y fundoplicaturas de Nissen con actuación solitaria del cirujano.11 Todos los procedimientos se llevaron a cabo exitosamente sin la colaboración de ningún asistente quirúrgico. Nosotros, recientemente hemos documentado la habilidad de AESOP para facilitar colectomías laparoscópicas con cirujano solitario.12 Comparamos catorce colectomías laparoscópicas asistidas por el robot realizadas en el 2000 con once colectomías laparoscópicas tradicionales llevadas a cabo el año previo. Todas las operaciones fueron hechas en casos benignos, hallando que no existió diferencia en los tiempos operatorios entre los dos grupos. Once de las catorce operaciones asistidas por el robot, se realizaron por un cirujano solitario haciendo uso de una técnica de tres trocares y sin la ayuda de un asistente quirúrgico. La razón más común para añadir un trocar adicional fue la necesidad de la lisis de adherencias de cirugías abdominales previas. Estos dos estudios indican que AESOP puede sustituir adecuadamente a un camarógrafo humano en procedimientos laparoscópicos de cirugía general. Inclusive, estos estudios hallaron que el cirujano puede frecuentemente lograr operaciones laparoscópicas gastrointestinales y de hernias por si solo, sin la colaboración de un cirujano asistente.
AESOP ha impulsado exitosamente la era quirúrgica de asistencia robótica. Confiablemente, puede reemplazar a un camarógrafo humano, proporcionando una plataforma estable para la cámara la cual frecuentemente acorta la distancia del cirujano y aparenta disminuir el riesgo de enfermedad de movimiento en el equipo operatorio. Cirujanos experimentados pueden hacer uso de AESOP para realizar cirugías laparoscópicas solitarias sin un camarógrafo o asistente quirúrgico. En algunos hospitales, AESOP puede ofrecer ventajas económicas al disminuir el número de empleados hospitalarios requeridos para asistir en operaciones laparoscópicas.
ENDOASSIST
Una compañía británica, Armstrong Healthcare Ltd, ha introducido al mercado un camarógrafo robótico llamado Endoassist.13 14 La FDA recientemente ha autorizado el uso de Endoassist dentro de los Estados Unidos. Desafortunadamente, muy poco es lo que se a publicado acerca de él hasta la fecha. El cirujano controla el movimiento con su cabeza (FIGURA 2), usando en su frente un dispositivo que emite rayos infrarrojos. El cirujano apunta el rayo al punto en el monitor de video que desea observar. El robot mueve la vista de la cámara a esa posición. Este sistema ofrece algunas ventajas a aquellos cirujanos que puedan encontrar distractivo la constante charla requerida para controlar a AESOP. Esta sujeto a una base separada que es rodada al costado del paciente.
El Departamento de Defensa de los Estados Unidos impulsó el desarrollo de la telerobótica con la esperanza de que los cirujanos del futuro pudiesen operar a soldados heridos en el campo de batalla desde lugares remotos. 15 Noventa por ciento de todas las muertes de combate ocurren antes de que el soldado herido pueda ser evacuado a un hospital militar o portaviones. Ciertamente, pocos soldados fallecen luego de haber llegado a estas instalaciones médicas. 16 17 Como resultado, el objetivo de la cirugía telerobótica era permitir a los cirujanos el tratar lesiones amenazantes para la vida, particularmente hemorragias desangrantes, en el campo de combate antes de que el soldado muera. 18 En este escenario, un médico traslada al soldado herido a una ambulancia blindada en el frente de combate la cual cuenta con un sistema quirúrgico robótico. El soldado es puesto debajo de los brazos robóticos. El cirujano se encuentra sentado en un terminal de computadora en el portaviones o en un hospital militar cercano, el que controla el sistema quirúrgico robótico. El cirujano ve una reconstrucción virtual del soldado y liga los vasos sangrantes con los instrumentos quirúrgicos telerobóticos. La primera cirugía telerobótica fue realizada en 1991.19 Bowersox y colegas fueron los primeros en probar la factibilidad de este concepto para aplicación militar con un prototipo de sistema telerrobótico en 1998.20
La cirugía telerobótica o cirugía de teleprescencia es el siguiente peldaño en la evolución de la cirugía robótica.21 La FDA ha aprobado dos sistemas de cirugía telerobótica para uso clínico dentro de los Estados Unidos. Intuitive Surgery (Mountain View, California) fabrica a Da Vinci y Computer Motion Incorporated (Santa Barbara, California) produce a Zeus. En ambos robots, el cirujano se sienta frente a una consola de computadora la cual está ubicada en un lugar distante al paciente. Actualmente, la FDA obliga al cirujano a permanecer en la misma sala de operaciones que el paciente. El campo operatorio es proyectado por sistemas de imagen tridimensional. El cirujano representa al amo y el robot al esclavo.22 La consola de la computadora traduce los movimientos de las manos del cirujano a movimientos en los instrumentos quirúrgicos telerobóticos. Estos funcionan con terminales articulados que se mueven sincrónicamente con los movimientos de las manos del cirujano, facilitando maniobras laparoscópicas complicadas, tal como suturar.
Da VINCI
La FDA autorizó a Da Vinci para uso clínico en cirugías abdominales el 4 de junio del 2000. Da Vinci consta de tres partes separadas (FIGURA 3). El cirujano se sienta frente a una consola o estación de trabajo (FIGURA 3). Sus manos se acoplan a los masters que actúan como interfase con la computadora (FIGURA 4). El cirujano se sienta en una posición conveniente y ergonómicamente cómodo. La computadora y el sistema de imagen 3-D ocupan el resto de la consola.Una torre contiene el equipo electrónico de video y el insuflador para el pneumoperitoneo. El robot cuenta con tres brazos (FIGURA 5). El brazo central sujeta la cámara, mientras los dos brazos laterales sostienen los instrumentos quirúrgicos. Estos a su vez se articulan en una muñeca, movilizándose con seis grados de libertad y dos grados de rotación axial. Los brazos robóticos son movidos al costado de la mesa quirúrgica. La computadora sigue el curso de la ubicación tridimensional de un punto cercano a la punta del trocar, mas no la punta de los instrumentos quirúrgicos. El telescopio pasa por un trocar de 12 mm y los instrumentos quirúrgicos a través de dos trocares de 8 mm. En los Estados Unidos, los instrumentos quirúrgicos son parcialmente reusables, pudiendo ser utilizados hasta en diez ocasiones. La computadora del telerobot lleva el registro del número de usos de cada instrumento y no operará ninguno de estos posterior a la décima usada.
Da Vinci se vanagloria de contar con un verdadero sistema de imagen tridimensional que se asemeja bastante a mirar a través de binoculares de campo. El telescopio para este sistema es de 12 mm de diámetro y contiene dos telescopios separados de 5 mm cada uno. Dos cámaras de video de 3-chips teledifunden la imagen a dos pantallas CRT distintas. Un sincronizador mantiene las imágenes de las dos cámaras en conjunto. Espejos reflejan las imágenes desde las pantallas CRT hasta el mirador binocular en la consola del cirujano. En este sistema, las imágenes de la derecha y de la izquierda permanecen separadas desde los telescopios hasta los ojos del cirujano. El ojo derecho ve la imagen derecha y el ojo izquierdo ve la imagen izquierda, tal como en los binoculares.
La consola del cirujano de Da Vinci genera un campo operatorio virtual. La cabecera esta diseñada como para que el cirujano se sumerja dentro del campo operatorio. Esto produce teleprescencia, la percepción de que uno se encuentra dentro del campo operatorio virtual. 23 Esto puede mejorar la percepción de un cirujano de una compleja anatomía tridimensional y ayudarlo a mantenerse orientado dentro del campo operatorio. Sin embargo, hay una tendencia del cirujano a escapar del verdadero ambiente de la sala de operaciones. La consola tiende a impedir la conversación, por ejemplo, con el equipo operatorio.
Nosotros recientemente hemos revisado resultados clínicos de cirugía telerobótica en otros lugares.24 Cadiere y colegas reportaron la primera ejecución clínica exitosa del sistema de cirugía telerobótica Da Vinci en marzo de 1997 cuando realizó una colecistectomía laparoscópica.25 Cadiere también reportó el uso exitoso de este sistema para un bypass gástrico con laparoscopía telerobótica 26, fundoplicatura de Nissen 27 y reanastomosis de la trompa de Falopio.28 Aproximadamente setenta y seis operaciones telerobóticas gastrointestinales han sido reportadas con el sistema robótico quirúrgico Da Vinci.29 30 31 32 33 34 35 36 37 38 La operación más comúnmente reportada fue la fundoplicatura de Nissen con treinta y ocho casos y la segunda más común fue la colecistectomía con veinte. Otras operaciones incluyen esofagectomías, gastrectomías, pancreatectomías distales, miotomías de Séller y colectomías. La mayoría de estos casos fueron presentados en la Sociedad Americana de Cirujanos Gastrointestinales (SAGES) en abril del 2001. Estos reportes indicaron que la cirugía telerobótica gastrointestinal podría ser realizada de forma segura.
Nosotros hemos examinado el impacto de Da Vinci en la duración de las colecistectomías laparoscópicas.39 Comparamos veinticinco pacientes que fueron intervenidos con una colecistectomía laparoscópica asistida con AESOP y veinticinco colecistectomías laparoscópicas asistidas con Da Vinci. Ambos grupos eran similares en edad, sexo, índice de masa corporal (IMC), e indicación para cirugía. No hubo muertes ni conversiones en uno u otro grupo. Hubo dos infecciones de herida operatoria en el grupo de Da Vinci (8.6%) y una infección de herida operatoria (4.5%); y un incidente de sangrado en el punto del trocar (4.5%), en el grupo de AESOP. No existieron diferencias significativas entre los tiempos de estadía postoperatoria, pérdidas sanguíneas o tiempos operatorios, entre ambos grupos. La duración de la cirugía desde la incisión hasta la puesta de gasas no descendió con experiencia adicional. Tiempo total de la sala de operaciones fue mayor en las operaciones con Da Vinci que en las operaciones con AESOP (154.8 vs. 134.4 minutos, p>0.05 por ANOVA) pero esta aparente diferencia de tiempos desapareció una vez que el equipo de la sala quirúrgica realizó junto nueve operaciones telerobótica. Este estudio halló que las operaciones con Da Vinci no requieren un tiempo total de sala de operaciones significantemente mayor que las operaciones con AESOP. Mas aun, las colecistectomías laparoscópicas telerobóticas lograron los mismos resultados clínicos.
El diseño actual de Da Vinci genera varias limitaciones. La altura y gran peso de sus componentes hace difícil trasladar a Da Vinci de una sala de operaciones a otra. Sin embargo, nosotros somos capaces de movilizar a nuestro Da Vinci de la sala de operaciones cardiovascular a la sala de laparoscopía con únicamente menores inconvenientes. Los brazos telerobóticos son sujetados por una torre separada y no se acoplan a la mesa de operaciones. Esto quiere decir que los brazos telerobóticos deben ser apartados del paciente cuando se desee cambiar la posición de este. Esto no representa un problema en operaciones tales como colecistectomías o fundoplicaturas de Nissen en las que el paciente es rara vez reacomodado. Sin embargo, durante colectomías esto suma algo más de tiempo al procedimiento. En estos casos, nosotros tratamos de movilizar la pelvis y el colon izquierdo con el paciente en una posición y luego lo reacomodamos para la movilización de la flexura esplénica. Esto limita el número de veces que los brazos telerobóticos son sujetados y resujetados al paciente, acelerando el procedimiento.
ZEUS
Tecnología similar ha sido desarrollada por Computer Motion, los fabricantes de AESOP, y comercializada bajo el nombre de Zeus. Computer Motion uso a AESOP como la base para la creación de un robot capaz de realizar cirugía telerobótica. En este sistema, el robot de comandos de voz AESOP, continúa sujetando la cámara. Dos unidades adicionales semejantes a AESOP han sido modificadas para sostener los instrumentos quirúrgicos (FIGURA 6). Estas tres unidades son independientemente acopladas en la mesa de la sala de operaciones (FIGURA 7). Una computadora dentro de la consola del cirujano controla los tres brazos. Esta lleva el rastro de la posición tridimensional de la punta de cada instrumento y de la cámara, mas no de la posición del trocar como en el caso de Da Vinci. En modelos previos, el cirujano controlaba los instrumentos laparoscópicos con mangos similares a los de los instrumentos de laparoscopía tradicional. La computadora traduce los movimientos de estos manubrios a mociones idénticas en los instrumentos quirúrgicos del robot. La versión más reciente de Zeus utiliza una interfase más ergonómica entre el cirujano y los instrumentos robóticos (FIGURA 8). Estos manubrios controlan instrumentos quirúrgicos que se articulan cerca de sus puntas. El cirujano se sienta en un cómodo asiento frente al monitor de video. La computadora elimina los tremores de descanso del cirujano y puede ser programada para llevar los movimientos de las manos de éste en escala, en rangos que fluctúan entre 2:1 hasta 10:1.
En Zeus, el cirujano observa la operación con un sistema de imágenes tridimensional de Storz (Karl Storz Endoscopy of North America, Santa Barbara, CA). El brazo robótico que controla la cámara es operado a través de comandos de voz por el cirujano. Este sistema de imágenes tridimensional acelera el rango de resolución del sistema de video. Cámaras de video separadas, derecha e izquierda, visualizan el campo operatorio. Cada una radiodifunde en una frecuencia de 30 cuadros por segundo. Una computadora incorpora y acelera esto a una frecuencia de radiodifusión de 60 cuadros por segundo. Este radiodifusor alterna cuadros de las cámaras de videos derecha e izquierda. El monitor de video presenta una matriz activa cubriendo su superficie, la cual se alterna entre un filtro polarizante que sigue el sentido de la aguja del reloj y otra que va en sentido inverso. El primer filtro se sincroniza con el cuadro de video derecho y el otro coincide con la imagen del video izquierdo. El cirujano utiliza lentes que presentan un filtro polarizante de sentido horario como lente derecho y un filtro polarizante antihorario como lente izquierdo. Estos permiten al ojo izquierdo ver únicamente las imágenes de video de la cámara izquierda y al ojo derecho las imágenes de video de la cámara derecha. Esto hace posible la proyección de una imagen en tres dimensiones desde el monitor de video.
La consola del cirujano de Zeus hace frente a diferentes objetivos filosóficos que aquellos de Da Vinci (FIGURA 6). Este no se esfuerza por lograr una teleinmersión, mas si intenta presentar al cirujano un ambiente operatorio que deriva directamente de la cirugía laparoscópica tradicional. El cirujano observa la proyección de la imagen en tres dimensiones en un monitor de video estándar. Él se sienta cómodamente en una silla, comunicándose con el camarógrafo con su voz. Así mismo, este controla los instrumentos quirúrgicos de manera similar a la cirugía laparoscópica. Efectivamente, versiones anteriores de la consola utilizaron mangos de instrumentos laparoscópicos estándar como la interfase entre el cirujano y la computadora. La introducción de movimientos semejantes a los manuales desde los instrumentos, requirió la evolución de los manubrios, haciéndose evidente la diferencia con los instrumentos quirúrgicos tradicionales. Este tipo de consolas mantienen mejor contacto entre el cirujano y el equipo operatorio, pero no genera el mismo sentido de inmersión dentro del campo operatorio virtual que logra la consola de Da Vinci.
La configuración del brazo telerobótico de Zeus ofrece una ventaja distinta para cirugías abdominales complejas (FIGURA 7). Los tres brazos están sujetos directamente a la mesa operatoria. Esto quiere decir que la mesa puede ser reposicionada sin interferir con el adecuado funcionamiento de los brazos robóticos. El paciente puede ser cambiado de la posición de Trendelenburg a Trendelenburg reversa sin la necesidad de acomodar los brazos. Esto facilita la realización de colectomías telerrobóticas.
La FDA ha concedido a Zeus únicamente una aprobación limitada para operaciones abdominales. Puede ser usado como camarógrafo y asistente operatorio pero todavía no como cirujano operador. Existe experiencia clínica limitada respecto a Zeus en los Estados Unidos. Esta restricción no se hace efectiva en los demás lugares. Marescaux y colegas, del Instituto Europeo de Telecirugía, recientemente reportaron la prueba clínica más grande con Zeus en cirugía abdominal.40 Veinticinco pacientes seleccionados se sometieron a colecistectomías laparoscópicas asistidas con Zeus. Una operación fue convertida de procedimiento telerrobótico a colecistectomía laparoscópica estándar. El tiempo medio para instalar y guardar al robot Zeus fue de 18 minutos. El tiempo medio de disección usando a Zeus fue de 25 minutos y el tiempo medio del total del tiempo operatorio fue de 108 minutos. La única complicación entre los veinticinco pacientes fue una posible embolia pulmonar, a pesar de que no se halló émbolo en la tomografía. El promedio del tiempo de permanencia postoperatoria fue de tres días, lo cual es similar a colecistectomías laparoscópicas estándares en Francia. Estos cirujanos remarcaron en este reporte las ventajas potenciales de un formato digitalizado para la transferencia de información y el espectro de cirugía robótica sobre larga distancia.
Recientemente, Zeus fue utilizado para lograr cirugía de teleprescencia con el cirujano separado por 3800 millas de su paciente. 41 El profesor Marescaux sentado frente a la consola de Zeus en la ciudad de Nueva York realizó una colecistectomía telerrobótica a un paciente en Strasbourg, Francia.42 43 La consola del cirujano estaba conectada directamente al brazo robótico de Zeus a través de un cable de fibra óptica trasatlántico. Esta conexión directa minimizó el retraso de tiempo entre los movimientos de las manos del cirujano, de los instrumentos robótico y la imagen de video de retorno. El uso de satélites para transmitir las señales digitales introducen una gran distancia y retrasan significativamente el recorrido de ida y vuelta de estas señales electrónicas. Este triunfo quirúrgico probó la realidad de la cirugía telerrobótica, y quizás, haya abierto una nueva era en la cirugía.
Figura 1. Colectomía robótica izquierda por "cirujano solitario". El cirujano utiliza un micrófono para poder controlar a AESOP . El robot AESOP reemplaza al camarógrafo laparoscópico y provee una plataforma estable para el telescopio de video. En esta operación, el cirujano solitariamente realizó una colectomía izquierda haciendo uso de una técnica de tres trocares

Figura 2. Endoassist reemplaza al camarógrafo. El cirujano controla los movimientos del robot a través de una luz infrarroja adherida a su cabeza . El robot no esta sujeto a la mesa operatoria, en lugar se para sobre una base separada. El robot se sitúa a lado del paciente y opuesto al cirujano. En esta fotografía , el cirujano realiza solitariamente una colecistectomía laparoscópica con el apoyo de Endoassist y una enfermera asistente(Fotografía cortesía de Armstrong Health Limited, High Wycombe, Reino Unido)
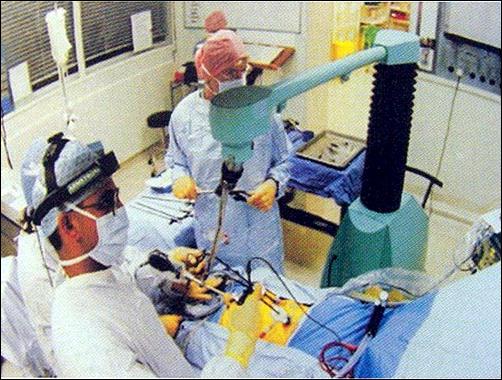
Figura 3. El sistema quirúrgico telerobótico Da Vinci. El cirujano se sienta frente a una consola de computadora y observa la operación a través de binoculares que proyectan un campo operatorio virtual. El cirujano pone sus manos sobre los "masters", los que traducen las mociones de sus manos a movimientos en los instrumentos quirúrgicos telerobóticos .Una torre sostiene los tres brazos del robot desde el lado derecho del paciente.Un asistente quirúrgico intercambia los instrumentos quirúrgicos según la necesidad

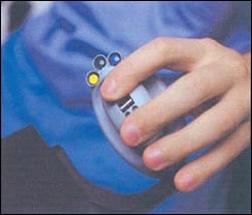
Figura 4. En Da Vinci, el cirujano se sienta frente a una consola de computadora . Él pone sus manos en estos "master", que traducen las mociones de las manos del cirujano en movimientos de los instrumentos quirúrgicos telerobóticos

Figura 5. El sistema quirúrgico telerobótico Da Vinci sostiene un telescopio stereo-óptico de 12 mm y dos intrumentos quirúrgicos. El telescopio teledifunde una imagen tridimensional del campo operatorio. Los instrumentos simulan los movimientos de las manos del cirujano. Ellos se mueven en 6 grados de libertad
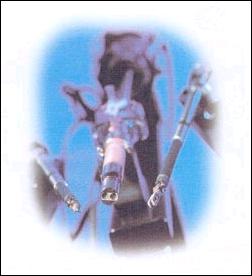
Figura 6. El sistema robótico telequirúrgico Zeus. El cirujano se sienta frente a una consola de computadora. Una imagen de video tridimensional es proyectada desde el monitor de video. El cirujano controla los movimientos de los instrumentos telerobóticos a través de mociones de sus manos. Tres brazos robóticos separados se sujetan directamente a la mesa operatoria . Un asistente intercambia los instrumentos quirúrgicos según la necesidad. (fotografía cortesía de Computer Motion Incorporated, Santa Barbara, California)
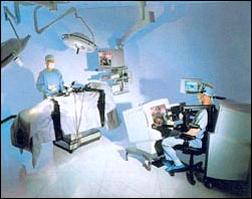
Figura 7. Los tres brazos de Zeus se sujetan directamente a la mesa operatoria. Un brazo sostiene la cámara de video y es controlado mediante comandos de vos. Los otros dos brazos sostienen los instrumentos quirúrgicos (Fotografía cortesía de Celest Hollands, M.D.;Lousiana State University Health Sciences Center, Shreveport, Lousiana)

Figura 8. Los manubrios de Zeus traducen las mociones de las manos del cirujano en los movimientos de los instrumentos quirúrgicos. Los instrumentos se mueven en 6 grados de libertad( Fotografía cortesía de Computer Motion Incorporated, Santa Barbara, California)
BIBLIOGRAFÍA
1. PAUL H, BARGAR WL, MITTESTADT B, et al. Development of a surgical robot for cementless total hip arthroplasty. Clin Orthop 1992; 285: 57-66. [ Links ]
2. TAYLOR RH, JOSKOWICZ L, WILLIAMSON, et al. Computer-integrated revision total hip replacemnt surgery: concept and preliminary results. Med Image Anal 1999; 3: 301-319. [ Links ]
3. MORAN ME. Stationary and automated laparoscopically assisted technologies. J Laparoendoscopic Surg 1993; 3: 221-227. [ Links ]
4. AREZZO A, ULMER F, WEISS O, SCHURR MO, HAMAD M, BUESS GF. Experimental trial on solo surgery for minimally invasive therapy: comparison of different systems in a phantom model. Surg Endosc 2000; 14: 955-959. [ Links ]
5. SACKIER JM, WANG Y. Robotically assisted laparoscopic surgery. From concept to development. Surg Endosc 1994; 8: 63-66. [ Links ]
6. JACOBS LK, SHAYANI V, SACKIER JM. Determination of the learning curve of the AESOP robot. Surg Endosc 1997; 11: 54-55. [ Links ]
7. JOHANET H. Voice-controlled robot: s new surgical aide? Thoughts of a user. Ann Chir 1998; 52: 918-921. [ Links ]
8. ALLAF ME, JACKMAN SV, SCHULAM PG, CADEDDU JA, LEE BR, MOORE RG, KAVOUSSI LR. Laparoscopic visual field. Voice vs foot pedal interfaces for control of the AESOP robot. Surg Endosc 1998; 12: 1415-1418. [ Links ]
9. HUBENS G, YSEBAERT D, VANEERDEWERG W, CHAPELLE T, EYSKENS E. Laparoscopic adrenalectomy with the aid of the AESOP 2000 robot. Acta Chir Belg 1999; 99: 125-127. [ Links ]
10. PIAZZA L, CARAGLIANO P, SCARDILLI M, SGROI AV, MARINO G, GIANNONE G. Laparoscopic robot-assisted adrenalectomy and left ovariectomy (case reports). Chir Ital 1999; 51: 456-466. [ Links ]
11. GEIS WP, KIM HC, BRENNAN EJ Jr, MCAFEE PC, WANG Y. Robotic arm enhancement to accommodate improved efficiency and decreased resource utilization in complex minimally invasive surgery procedures. Stud Health Technol Inform 1996; 29: 471-481. [ Links ]
12. BALLANTYNE GH, MEROLA P, WEBER A, WASIELEWSKI A. Robotic solutions to the pitfalls of laparoscopic colectomy. Ospedali dItalia Chirurgia 2001; Sept-Oct (5): (IN PRESS). [ Links ]
13. YAVUZ Y, YSTGAARD B, SKOGVOLL E, MARVIK R. A comparative study evaluating the performance of surgical robots AESOP and Endosista. Surg Laparosc, Endosc & Percut Tech 2000; 10: 163-167. [ Links ]
14. AREZZO A, TESTA T, ULMER F, SCHURR MO, DEGREGORI M, BUESS GF. Positioning systems for endoscopic solo surgery. Minerva Chir 2000; 55: 635-641. [ Links ]
15. SATAVA RM. Virtual reality, telesurgery, and the new world order of medicine. J Image Guid Surg 1995; 1: 12-16. [ Links ]
16. BELLAMY Rf, MANINGS PA, VAYER JS. Edidemiology of trauma: military experience. Ann Emerg Med 1986; 15: 1384-1388. [ Links ]
17. BELLAMY RF. The causes of death in conventional land warfare: implications for combat casualty care research. Mil Med 1984; 149: 55-63. [ Links ]
18. SATAVA RM. Virtual reality and telepresence for military medicine. Ann Acad Med Singapore 1997; 26: 118-120. [ Links ]
19. GREEN PE, PIANTANIDA TA, HILL JW, SIMON IB, SATAVA RM. Telepresence: Dexterous procedures in a virtual operating field. Am Surg 1991; 57: 192 (Abstract). [ Links ]
20. BOWERSOX JC, CORDOTS PR, LAPORTA AJ. Use of an intuitive telemanipulator system for remote trauma surgery: an experimental study. J Amer Col Surg 1998; 186: 615-621. [ Links ]
21. SATAVA RM, JONES SB. Preparing surgeons for the 21st Century. Surg Clin N Amer 2000; 80: 1353-1365. [ Links ]
22. RININSLAND HH. Basics of robotics and manipulators in endoscopic surgery. End Surg 1993; 1: 154-159. [ Links ]
23. BALLANTYNE GH. Robotic surgery, telerobotic surgery, telepresence & telementoring: Results of early clinical experience. Surg Endosc (Submittes). [ Links ]
24. BALLANTYNE GH. Robotic surgery, telerobotic surgery, telepresence & telementoring: Results of early clinical experience. Surg Endosc (Submittes). [ Links ]
25. HIMPENS J, LEMAN G, CADIERE GB. Telesurgical laparoscopic cholecystectomy. Surg Endosc 1998; 12: 1091 (Letter to the Editor). [ Links ]
26. CADIERE GB, HIMPENS J, VERTRUYEN M, FAVRETTI F. The worlds first obesity surgery performed by a surgeon at a distance. Obes Surg 1999; 9: 206-209. [ Links ]
27. CADIERE GB, HIMPENS J, VERTRUYEN M, BRUYNS J, FOURTAINER G. Nissen fundoplication done by remotely controlled robotic technician. Ann Chir 1999; 53: 137-141. [ Links ]
28. DEGUELDRE M, VANDROMME J, HUONG PT, CADIERE GB. Robotically assisted laparoscopic microsurgical tubal anastomosis: a feasibility study. Fert Steril 2000; 74: 1020-1023. [ Links ]
29. HANISCH E, MARKUS B, GUTT C, SCHMANDRA TC, ENCKE A. Robot-assisted laparoscopic cholecystecomy and fundoplication – initial experience with the Da Vinci system. Chirurg 2001; 72: 286-288. [ Links ]
30. MEININGER D, BYHAHN C, MARKUS BH, HELLER K, WESTPHAL K. Total endoscopic Nissen fundoplication with the robotic device Da Vinci in children. Hemodynamics, gas exchange, and anesthesthetic management. Anaesthesist 2001; 50: 271-275. [ Links ]
31. HASHIZUME M, SUGIMACHI K, SHIMADA M, TOMIKAWA M, et al. Da Vinci-assisted totally endoscopic procedures in the abdominal surgery. Surg Endosc 2001; 15: S131 (abstract). [ Links ]
32. CHAPMAN WHH, ALBRECHT RJ, KIM VB, YOUNG JA, NIFONG LW, CHITWOOD WR Jr. Computer enhanced robotically assisted telemanipulative cholecystectomy. Surg Endosc 2001; 15: S114 (abstract). [ Links ]
33. YOUNG JA, CHAPMAN WHH, ALBRECHT RJ, KIM VB, NIFONG LW, CHITWOOD WR Jr. Initial patient series with robotic assisted Nissen fundoplication. Surg Endosc 2001; 15: S175 (abstract). [ Links ]
34. MELVIN WS, NEEDLEMAN BJ, KRAUSE KR, SCHEIDER C, WOLF RK, MICHLER RE, ELLISON EC. Computer enhanced robotic telesurgery: initial experience in foregut surgery. Surg Endosc 2001; 15: S148 (abstract). [ Links ]
35. OZAWA S, FURUKAWA T, OHGAMI M, WAKABAYASHI G, KITAJIMA M. Robot-assisted laparoscopic anti-reflux surgery. Surg Endosc 2001; 15: S152 (abstract). [ Links ]
36. TALMINI MA, CAMPBELL K, STANFIELD C, ARE C. Robotic laparoscopic surgery: early lessons learned. Surg Endosc 2001; 15: S 165 (abstract). [ Links ]
37. CADIERE GB, HIMPENS J, VERTRUYEN M, BRUYNS J, GERMANY O, IZIZAW R. Evaluation of telesurgical (robotic) Nissen fundoplication. Surg Endosc 2001; 15: 918-923. [ Links ]
38. BALLANTYNE GH, MEROLA S, WEBER P, WASIELEWSKI A. Robotic solutions to the pitfalls of laparoscopic colectomy. Osp Ital Chir 2001; 7: (IN PRESS). [ Links ]
39. HOURMONT K, WASIELEWSKI A, DAVIES R, BALLANTYNE GH. Robotic versus telerobotic laparoscopic cholecystectomy: Duration of surgery and outcomes. Surg Endosc (submitted). [ Links ]
40. MARESCAUX J, SMITH MK, FOLSCHER D, JAMALI F, MALASSAGNE B, LEROY J. Telerobotic laparoscopic cholecystectomy: Initial clinical experience with 25 patients. Ann Surg 2001; 234: 1-7. [ Links ]
41. Remote gallbladder operation spans 3,800 miles. New York Times. September 20, 2001. [ Links ]
42. MARESCAUX J, LEROY J, GAGNER M, RUBINO F, MUTTER D, VIX M, BUTNER SE, SMITH MK. Transatlantic robot-assisted telesurgery. Nature 2001; 413: 379-380. [ Links ]
43. LARKIN M. Transatlantic, robot-assisted telesurgery deemed a success. Lancet 2001; 358: 1074. [ Links ]
